모바일 광대역 mmWave 시스템을 위한 고해상도 각도 추적 및 안테나 보정
초록
본 논문은 이동성에 따른 빔 정렬 오류를 최소화하기 위해, 보조 빔 쌍을 활용한 고해상도 각도 추적 기법을 제안한다. 제안 방법은 각도 변동 모델에 의존하지 않으며, 안테나 배열 보정 오류가 추적 성능에 미치는 영향을 분석하고, 두 가지 보정 방식을 설계한다. 시뮬레이션 결과, 다양한 배열 구조와 채널 모델에서도 높은 추적 정확도와 스펙트럼 효율을 달성한다.
상세 분석
이 논문은 mmWave 통신에서 빔 정렬이 성능에 미치는 영향을 깊이 탐구하고, 특히 이동 중인 UE와 BS 사이의 각도 변화에 대한 실시간 추적 문제를 해결하고자 한다. 기존의 그리드‑오브‑빔 방식은 사전 정의된 빔 집합을 순차적으로 탐색하므로 해상도가 빔 간격에 제한받고, 트래킹 오버헤드와 지연이 크게 증가한다. 저자들은 이러한 한계를 극복하기 위해 ‘보조 빔 쌍(Auxiliary Beam Pair, ABP)’ 개념을 도입한다. ABP는 두 개의 인접한 빔을 동시에 송신·수신함으로써, 각 빔에서 측정된 수신 전력 차이를 이용해 미세한 각도 변화를 아날로그 수준에서 추정한다. 이때 각도 변동 모델(예: 선형, 가우시안 등)을 가정하지 않으며, 실제 측정값에 기반한 비그리드 방식이므로 해상도가 이론적으로 무한에 가깝다.
핵심 수식은 두 보조 빔의 전력 비율을 각도 오프셋 θ에 대한 함수로 모델링하고, 이를 역함수 형태로 풀어 θ̂를 얻는 것이다. 이 과정에서 잡음에 대한 민감도를 감소시키기 위해 다중 서브캐리어에 걸친 평균화와, 디지털 피드백을 통한 차분 보정(differential feedback) 전략을 제시한다. 차분 피드백은 절대 각도가 아닌 각도 변화량만을 전송함으로써 피드백 비트를 크게 절감한다.
또한, 실제 하드웨어에서는 위상·증폭 불균형 등 배열 보정 오류가 존재한다. 저자들은 두 가지 보정 방법을 설계한다. 첫 번째는 ‘수신 결합 기반 보정’으로, 다중 RF 체인을 이용해 알려진 레퍼런스 신호를 전송하고, 각 안테나 요소의 복합 응답을 추정해 보정 행렬을 도출한다. 두 번째는 ‘전송 측 보정’으로, BS에서 사전 정의된 파일럿 빔을 순차적으로 송신해 UE가 응답하는 방식이다. 두 방법 모두 배열의 방사 패턴 왜곡을 최소화하고, 보정 후에도 ABP 기반 추적이 정상 동작함을 시뮬레이션으로 검증한다.
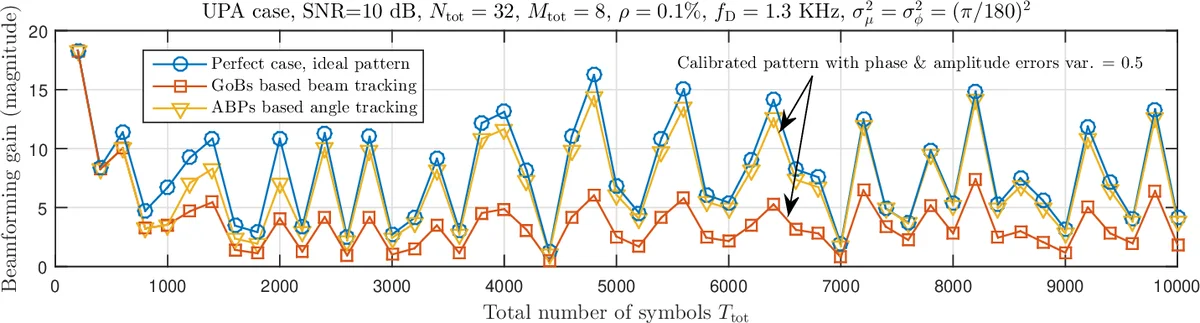
성능 평가에서는 UPA 기반 BS와 ULA 기반 UE를 가정하고, LOS와 NLOS 혼합 채널, 다양한 이동 속도(0–30 km/h) 및 SNR 환경을 고려한다. 결과는 보조 빔 쌍을 이용한 추적이 기존 그리드 방식 대비 평균 각도 오차를 5배 이상 감소시키고, 트래킹 주기와 피드백 오버헤드를 70 % 이상 절감함을 보여준다. 특히 보정 오류가 5° 이하인 경우, 스펙트럼 효율 손실이 거의 없으며, 10 dB SNR에서 90 % 이상의 성공적인 트래킹 확률을 달성한다.
이 논문은 아날로그 빔포밍 기반 하이브리드 구조에서도 구현 가능하도록 설계했으며, 5G NR 및 차세대 IEEE 802.11ay와 같은 실제 표준에 적용 가능성을 제시한다. 향후 연구 과제로는 다중 사용자 상황에서의 동시 추적, 그리고 머신러닝 기반 보정 자동화가 제시된다.
댓글 및 학술 토론
Loading comments...
의견 남기기