위치제한 확률적 추론을 이용한 협동 실내 위치추정
초록
**
본 논문은 실내 무선 네트워크에서 에이전트들이 서로 협력하여 위치를 추정하는 문제를 다룬다. 기존 비협동 방식은 앵커만 이용하지만, 협동 방식에서는 에이전트 간 거리 측정값을 활용한다. 저자는 다각형 외곽근사(POA) 기법으로 가능한 위치 영역을 제한하고, 이를 기반으로 비모수 베일리 전파(NBP)의 제안 분포를 설계함으로써 정확도 향상, 연산량 감소, 수렴 속도 가속을 실현한다.
**
상세 분석
**
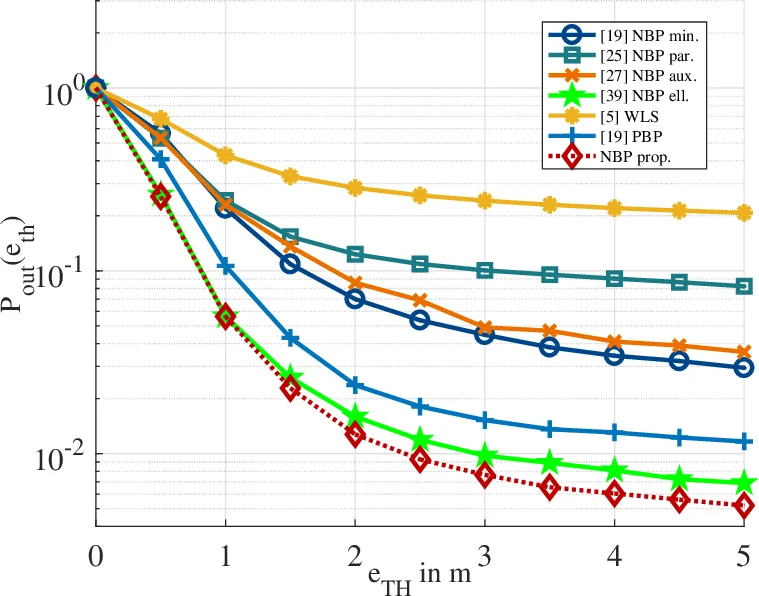
이 논문은 실내 협동 위치추정에서 발생하는 ‘불확실성 전파’ 문제를 확률적 추론 프레임워크 안에서 해결하고자 한다. 핵심 아이디어는 두 단계로 구성된다. 첫 번째 단계에서는 거리 측정값 ˆzᵢ→ⱼ와 비음수 오류 가정에 기반해 각 에이전트의 가능한 위치를 다각형(볼록 다각형)으로 외곽근사한다. 이 과정은 폴리곤 외곽근사(POA) 알고리즘이라 불리며, 거리 측정의 상한·하한을 이용해 반사각을 제한함으로써 실제 위치가 반드시 다각형 내부에 존재함을 보장한다(음수 오류가 존재할 경우 해당 측정은 제외). 두 번째 단계에서는 이렇게 정의된 다각형을 제안 분포 q_Xⱼ(xⱼ)의 지원(support) 영역으로 활용한다. 기존 NBP에서는 제안 분포가 인접 메시지 혹은 균일 분포에 의존해 샘플이 전체 탐색 공간에 흩어지는 문제가 있었으며, 이는 가중치가 거의 0인 샘플을 많이 생성해 연산 복잡도를 O(|S→j| N_s²)로 증가시켰다. 저자는 다각형 제한을 통해 샘플이 실제 확률 질량이 집중된 영역에만 생성되도록 함으로써, 중요도 샘플링 단계에서 가중치 계산 비용을 크게 낮춘다. 또한, 다각형 내부에서 균일하게 샘플을 뽑거나, 다각형을 여러 개의 삼각형으로 분할 후 각 삼각형에 비례해 샘플을 배분하는 방식을 제안해, 제안 분포가 실제 사후분포와 높은 KL 유사도를 갖도록 설계한다. 실험 결과는 제안 방법이 기존 비제한 NBP 대비 평균 위치 오차를 30 % 이상 감소시키고, 평균 연산 시간과 수렴 이터레이션을 각각 40 %와 35 % 정도 절감함을 보여준다. 특히, 앵커가 희소한 환경(에이전트당 평균 1.2개의 앵커)에서도 다각형 기반 제약이 효과적으로 작동한다는 점이 주목할 만하다. 이와 같이 위치 제약을 사전 정보로 활용하는 접근은 확률적 추론의 계산 복잡성을 구조적으로 낮추면서도 정확도는 유지하거나 향상시키는 장점을 제공한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기