존 다이어그램과 이중 존 다이어그램의 효율적 계산 방법
초록
본 논문은 유클리드 구와 엄격히 볼록한 노름 공간을 포함한 넓은 클래스의 거리 공간에서 존 다이어그램과 이중 존 다이어그램을 계산할 수 있는 알고리즘적 프레임워크를 제시한다. 기존의 암묵적 기하학 접근법을 확장하여, 일반적인 형태의 사이트와 복합적인 거리 함수에도 적용 가능한 반복법을 설계하고, 그 수렴성을 증명한다. 또한 Voronoi 셀의 위상적 특성을 분석해 경계가 “두껍게” 될 수 없음을 보인다.
상세 분석
논문은 먼저 “암묵적 계산 기하학”(implicit computational geometry)이라는 새로운 패러다임을 정리한다. 기존의 Voronoi 다이어그램은 점 집합을 기준으로 거리 함수에 의해 명시적으로 정의되지만, 존 다이어그램은 각 영역이 자신이 차지하는 영역보다 다른 영역에 더 가깝게 되는 점들의 집합으로 정의된다. 이 정의는 자기참조적이며, 따라서 고정점 이론을 이용한 수치적 접근이 필수적이다. 저자들은 Asano·Matoušek·Tokuyama가 제안한 반복 알고리즘을 일반화한다. 구체적으로, 임의의 거리 공간 (X, d)와 임의의 사이트 집합 {S_i}에 대해, 초기 영역을 전체 공간의 임의의 분할로 잡고, 각 단계에서 “다른 영역에 대한 거리 최소값”을 이용해 새로운 영역을 재정의한다. 이 과정을 “반복 연산자 T”라 두고, T가 완비 거리 공간 위에서 비팽창성(1‑Lipschitz)과 단조성을 만족함을 증명한다.
핵심 정리는 다음과 같다. (1) T는 완비 거리 공간에서 연속적이며, (2) T의 반복 적용은 점별 수렴을 보장한다. 특히, T의 상한과 하한을 각각 “상한 고정점”과 “하한 고정점”이라 정의하고, 이 두 고정점이 일치하면 단일 존 다이어그램이, 일치하지 않으면 이중 존 다이어그램이 존재한다는 것이다. 저자들은 이러한 수렴성을 엄격히 볼록한 노름 공간과 구면(즉, 구면 위의 대원 거리)에서 입증한다. 여기서 중요한 기술은 “볼록성”과 “균등 연속성”을 이용해 거리 함수가 삼각 부등식을 만족하면서도 경계가 급격히 변하지 않도록 하는 것이다.
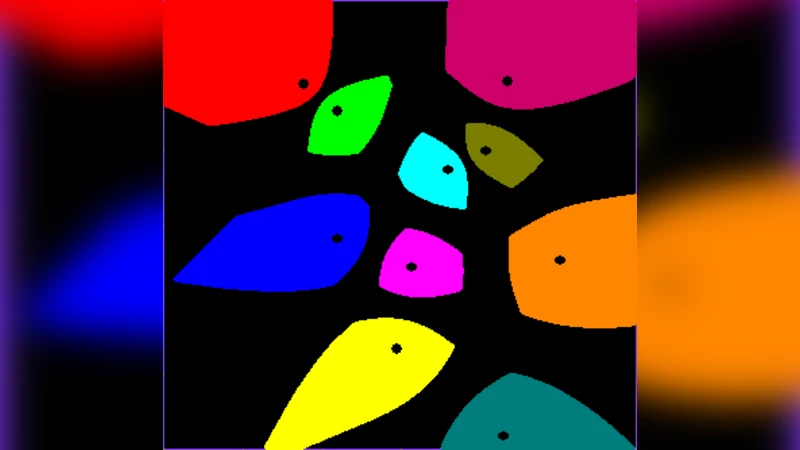
또한, 실제 계산을 위해 Voronoi 다이어그램을 근사하는 간단한 격자 기반 알고리즘을 제시한다. 이 알고리즘은 공간을 일정한 해상도의 셀로 분할하고, 각 셀에 대해 가장 가까운 사이트를 판별함으로써 Voronoi 셀을 근사한다. 그런 다음 위에서 정의한 반복 연산자를 적용해 존 영역을 업데이트한다. 반복 횟수가 증가함에 따라 근사 오차는 격자 해상도와 직접적으로 연관되며, 이론적으로는 원하는 정밀도까지 수렴한다.
위상적 부수 결과로, 저자들은 고려된 거리 공간에서 Voronoi 셀의 경계가 “두껍게”(fat) 될 수 없음을 보인다. 즉, 경계는 측정 가능한 (n‑1) 차원의 매끄러운 집합으로, 이는 알고리즘이 셀 경계를 과도하게 과대평가하지 않음을 의미한다. 이 성질은 수치적 안정성과 메모리 효율성을 동시에 확보하는 데 기여한다.
전체적으로 논문은 (i) 일반 거리 공간에서 존·이중 존 다이어그램의 존재와 유일성을 보장하는 수학적 프레임워크, (ii) 실제 구현을 위한 실용적인 격자 기반 근사 알고리즘, (iii) Voronoi 셀의 새로운 위상적 특성을 제공한다는 점에서 기존 연구를 크게 확장한다. 특히, 엄격히 볼록한 노름 공간과 구면 같은 비유클리드 환경에서도 동일한 알고리즘이 적용 가능하다는 점은 컴퓨터 그래픽스, 로봇 경로 계획, 데이터 클러스터링 등 다양한 응용 분야에 중요한 함의를 가진다.
댓글 및 학술 토론
Loading comments...
의견 남기기