다중측위 기반 로컬 포지션 측정의 TOA‑TDOA 전환과 사전 필터링 혁신
본 논문은 LPM(Local Position Measurement) 시스템에서 전통적인 TOA(Time of Arrival) 방식을 TDOA(Time Difference of Arrival)로 변환하고, 측정값을 위치 추정 전에 필터링함으로써 오프셋 제거, 잡음 억제, 연산 속도 향상을 달성한다. 선형·비선형 해법을 비교하고, 이동 평균 및 1‑차원 칼만 필터 등 간단한 사전 처리 기법이 다중측위 정확도와 안정성을 크게 개선함을 실험적으로 입증…
저자: Juri Sidorenko, Norbert Scherer-Negenborn, Eckart Michaelsen
본 논문은 고정밀 3차원 위치 추정이 가능한 Local Position Measurement(LPM) 시스템을 대상으로, 기존에 널리 사용되어 온 TOA(Time of Arrival) 기반 비선형 다중측위 방법의 한계를 짚고 새로운 접근법을 제시한다. LPM은 FMCW 레이더 원리를 차용해 전송 주파수와 수신 주파수 차이를 측정하고, 이를 의사거리 R과 시스템 고유 오프셋 O의 합으로 표현한다(식 1). 오프셋 O는 각 측정마다 10⁶배에 달하는 큰 값으로 변동성이 크며, 이는 비선형 최적화 시 초기값에 대한 의존성을 높이고, 지역 최적점에 빠지는 원인이 된다.
저자들은 먼저 TOA 방정식을 TDOA(Time Difference of Arrival) 형태로 변환한다. 두 기지국 Bᵢ, Bⱼ에 대한 의사거리 차이 Lᵢ‑Lⱼ을 구하면 오프셋이 상쇄되고, 남는 식은 순수 거리 차이만을 포함한다(식 5‑6). 이 과정에서 기존의 비선형 방정식(식 1‑3)을 선형 행렬 형태로 재구성할 수 있게 되며, 전송기 M의 좌표 (x_M, y_M, z_M)와 오프셋 O를 동시에 구하는 복잡한 비선형 시스템을 풀 필요가 없어진다.
선형 해법의 장점은 다음과 같다. 첫째, 초기값이 필요 없으며, 행렬 연산만으로 실시간 1 kHz 수준의 측정 데이터를 처리할 수 있다. 둘째, 오프셋이 사라졌기 때문에 잡음이 가우시안 분포를 따르는 가정이 타당해져, χ² 기반 이상치 검출이 효과적으로 적용될 수 있다. 셋째, 비선형 솔버가 요구하는 복잡한 수치 미분이나 반복 계산이 없으므로, 하드웨어 구현이 간단해진다.
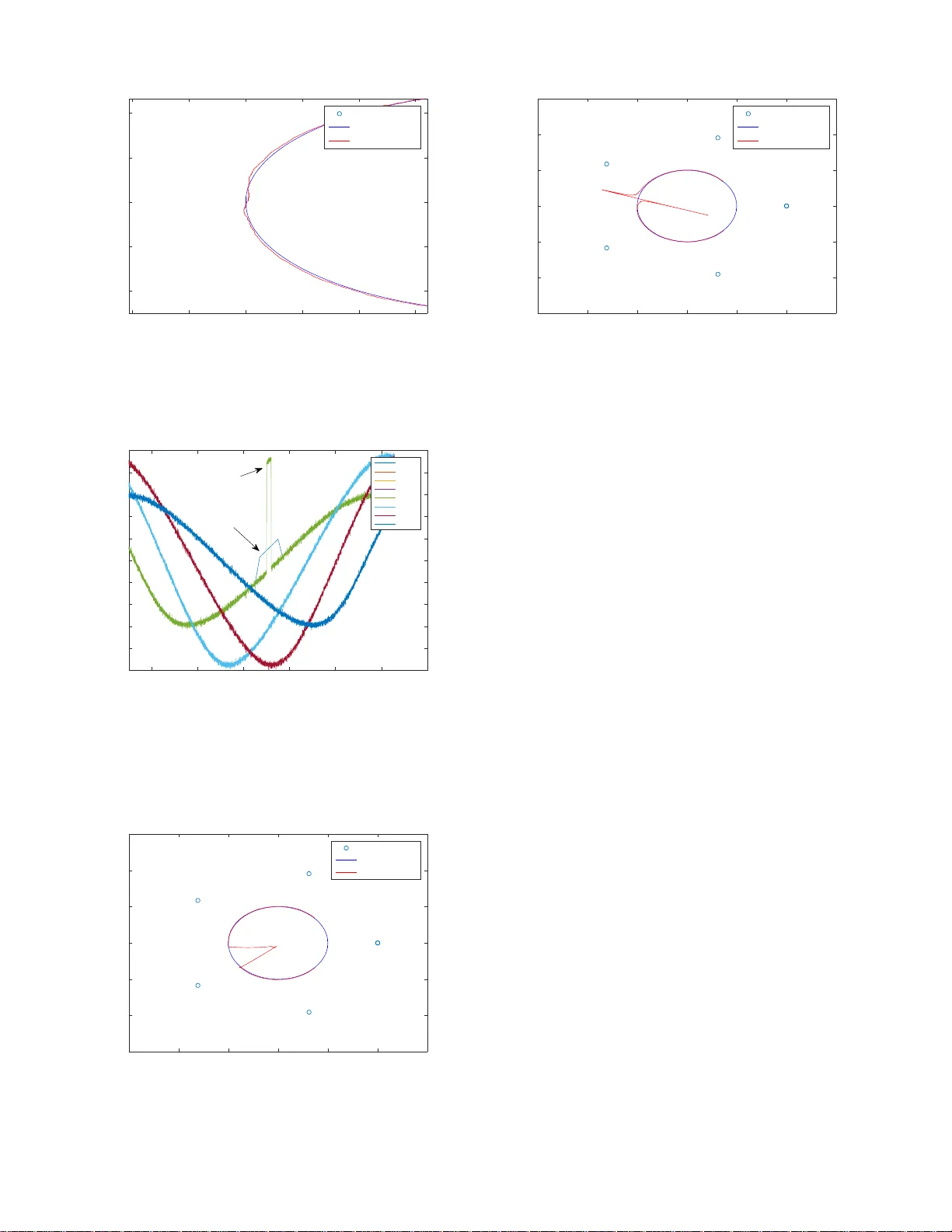
하지만 선형 해법은 기지국 배치가 거의 동공선에 가깝거나, 행렬 A의 대각 원소가 0에 근접하면 조건수가 악화되어 해가 불안정해지는 단점을 가진다. 이를 보완하기 위해 저자는 측정값 차이 (Lᵢ‑Lⱼ) 에 사전 필터링을 적용한다. 구체적으로는 이동 평균(FIR) 필터와 1‑차원 칼만 필터를 사용해 잡음 분산을 감소시키고, 반사·다중 경로에 의한 이상치를 명확히 드러낸다. 실험에서는 각 기지국별 잡음 분산이 0.003 m²에서 0.036 m² 사이이며, 이동 평균을 5~7 샘플 윈도우로 적용했을 때, 변동성이 크게 감소하고 위치 추정 평균 오차가 0.5 m 이하로 개선되었다.
또한, 오프셋이 제거된 TDOA 형태에서는 기존에 사용되던 χ² 기반 이상치 검출이 더욱 효과적이다. 오프셋이 존재하면 잔차가 오프셋에 의해 지배되어 통계적 검정이 무의미해지지만, TDOA 변환 후에는 잔차가 순수 거리 차이만을 반영하므로 가우시안 가정이 타당해진다. 따라서 비선형 솔버에 의존하지 않고도 간단한 선형 회귀와 사전 필터링만으로 충분히 정확한 위치를 복원할 수 있다.
논문은 전체 흐름을 다음과 같이 정리한다. ① LPM 시스템의 기본 원리와 기존 TOA 기반 비선형 다중측위 소개, ② TOA→TDOA 변환을 통한 오프셋 제거와 선형 방정식 도출, ③ 측정 전 사전 필터링(이동 평균, 1‑차원 칼만) 적용 방법과 잡음·이상치 억제 효과 분석, ④ 시뮬레이션 및 실제 실험을 통한 성능 검증(오차 0.5 m 이하, 연산 속도 향상), ⑤ 장점(연산 효율, 자기 보정 가능성)과 단점(추가 기지국 필요, 조건수 악화 위험) 논의.
결론적으로, 본 연구는 LPM 시스템에서 TOA 기반 비선형 다중측위의 복잡성을 크게 낮추고, 실시간 고속 측정 환경에 적합한 선형·사전 필터링 기반 접근법을 제시한다. 이 방법은 시스템 자체의 자기 보정(self‑calibration) 가능성을 열어주며, 향후 실내·외 복합 환경에서의 고정밀 위치 추적 및 로봇 내비게이션 등에 적용될 잠재력이 크다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기