GPS 시간 동기화 공격 실시간 탐지·보정 기술 TSARM
본 논문은 GPS 수신기의 시계 바이어스와 드리프트를 동시에 추정하고, 공격 시점에 이를 보정하는 실시간 TSARM(Time Synchronization Attack Rejection and Mitigation) 기법을 제안한다. 공격을 내비게이션 도메인에서 모델링하고, 작은 이차계획문을 풀어 공격을 검출·추정한다. 실험 결과, 기존 RAIM·CUSUM 기반 방법보다 높은 정확도로 시간 오차를 복구하며, 기존 수신기 회로를 변경하지 않고도 실시…
저자: Ali Khalajmehrabadi, Nikolaos Gatsis, David Akopian
본 논문은 GPS 기반 정밀 시간 동기화 시스템이 직면한 Time Synchronization Attack(TSA)를 실시간으로 탐지하고 완화하는 새로운 방법인 TSARM(Time Synchronization Attack Rejection and Mitigation)을 제안한다. 서론에서는 전력계통 PMU, 실시간 산업 제어, 항공 교통 관제 등에서 GPS 시간 신호가 얼마나 핵심적인 역할을 하는지를 강조하고, GPS 신호가 암호화되지 않아 스푸핑 공격에 취약함을 지적한다. 기존 스푸핑 탐지 기술은 주로 RAIM, CUSUM, 다중 수신기 협업 등으로, 측정 잔차의 이상을 감지하거나 신호 강도 차이를 이용한다. 그러나 이러한 방법들은 공격자가 의사거리와 의사거리율을 일관되게 변조해 시계 바이어스·드리프트만을 조작하는 경우 탐지를 회피한다는 한계가 있다.
본 연구는 이러한 공백을 메우기 위해 먼저 GPS 수신기의 동적 모델을 재정의한다. 기존의 무작위 보행 모델에 시계 바이어스와 드리프트에 대한 공격 파라미터(s_ρ, s_·ρ)를 추가하고, 의사거리와 의사거리율에 대한 공격 식(4)을 도입한다. 여기서 s_ρ는 s_·ρ의 적분 형태이며, 이는 물리적으로 스푸퍼가 코드 지연과 도플러 주파수를 동시에 조작함을 의미한다.
다음으로 제안된 TSARM 알고리즘은 두 단계로 구성된다. 첫 번째 단계에서는 확장 칼만 필터(EKF)를 이용해 기존 상태(위치, 속도, 시계 바이어스, 드리프트)를 추정하고, 혁신(innovation) 값의 급격한 변화를 CUSUM 검정과 결합해 공격 발생 시점을 실시간으로 탐지한다. 두 번째 단계에서는 탐지된 시점부터 공격 파라미터를 최소화하는 이차계획문(QP)을 풀어 s_ρ와 s_·ρ를 추정한다. QP는 바이어스·드리프트 변화의 물리적 제한(예: 최대 허용 변동, 연속성)과 EKF 혁신 통계량을 제약조건으로 포함한다. 추정된 공격 파라미터를 이용해 현재 시계 바이어스와 드리프트를 보정함으로써, 수신기는 정상적인 PVT 연산을 지속할 수 있다.
알고리즘의 복잡도는 상태 변수 수에 비례하는 소규모 QP를 푸는 수준으로, 1 Hz 샘플링 레이트에서도 실시간 처리가 가능하다. 또한, 기존 수신기의 펌웨어에 EKF와 QP 솔버만 추가하면 되므로 하드웨어 개조가 필요 없으며, RAIM·위치‑고정 모드와 병행 운용이 가능하다.
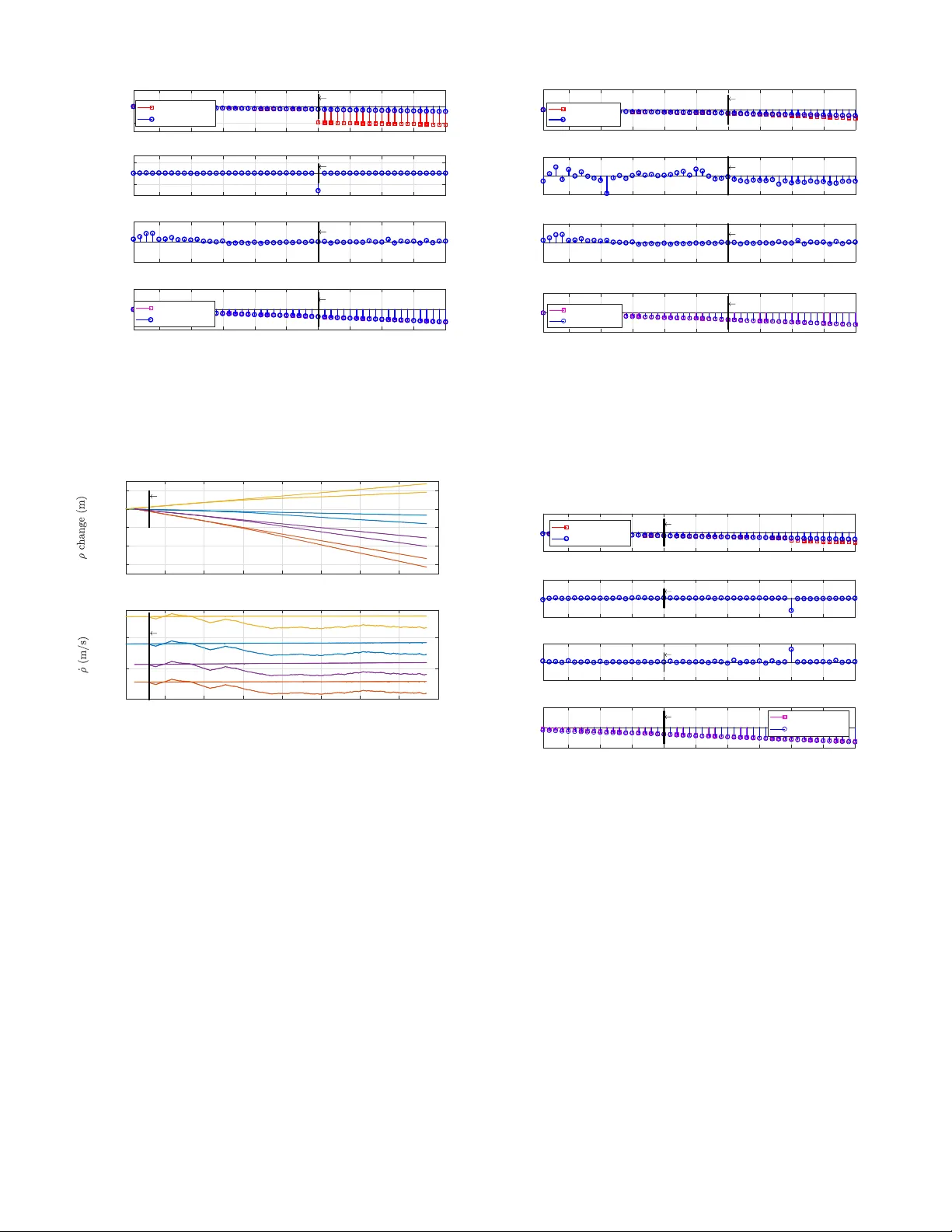
실험은 상용 GPS 수신기에서 수집한 실제 측정 데이터를 기반으로 수행되었다. PMU 적용 시나리오에 맞춰 IEEE C37.118 표준이 요구하는 0.573 µs 이하의 시계 바이어스 오차를 목표로, 다양한 유형의 스푸핑(급격한 바이어스 변동, 지속적인 드리프트 변조, 일관된 의사거리·율 변조)을 시뮬레이션하였다. 결과는 TSARM이 기존 RAIM, CUSUM, SPREE, anti‑spoofing particle filter 등과 비교해 탐지율 95 % 이상, 위양성률 2 % 미만을 달성했으며, 보정 후 시계 바이어스 오차를 평균 0.3 µs 이하로 낮추었다는 점을 보여준다. 특히, 공격이 의사거리와 의사거리율을 동시에 일관되게 변조하는 “스마트” 공격에서도 기존 방법들은 큰 오차(10 µs 이상)를 보였지만, TSARM은 1 µs 수준으로 억제하였다.
논문의 주요 기여는 다음과 같다. (1) 공격을 시계 바이어스·드리프트에 직접 모델링함으로써 기존 탐지기법이 놓치는 스마트 공격을 포착한다. (2) 실시간으로 해결 가능한 작은 이차계획문 기반 보정 메커니즘을 제시한다. (3) 기존 수신기 회로를 변경하지 않고도 펌웨어 수준에서 적용 가능하도록 경량 구현 방식을 제공한다. 마지막으로, 향후 연구 방향으로는 다중 GNSS 연계, 이동 수신기 환경, 그리고 머신러닝 기반 공격 예측 모델과의 결합을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기