CAN 패킷 송신자를 물리적 지문으로 식별하는 방법
초록
본 논문은 CAN 버스에서 전송된 패킷을 물리적 신호 특성을 이용해 송신 ECU와 연결 채널을 식별하는 프레임워크를 제안한다. 시간·주파수 영역의 11가지 통계적 특징을 추출하고, 이를 기반으로 신경망 분류기를 학습시켜 95.2%의 채널 식별 정확도와 98.3%의 ECU 식별 정확도를 달성하였다.
상세 분석
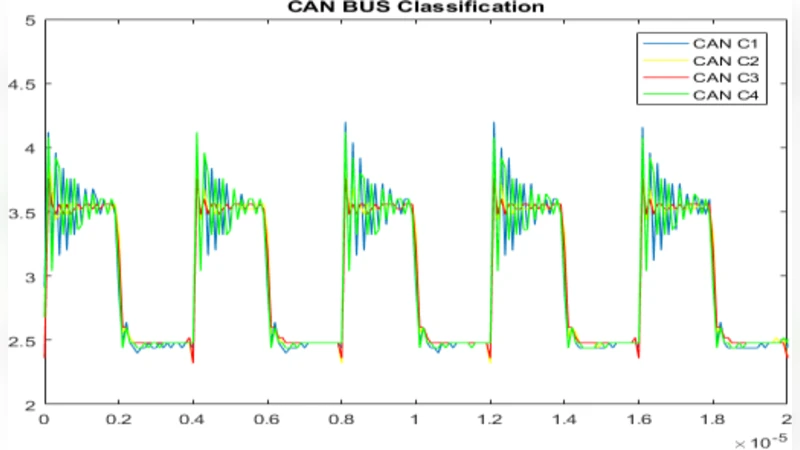
이 연구는 기존 CAN‑Bus 보안이 메시지 인증 부재로 인해 스푸핑 공격에 취약하다는 점을 출발점으로 삼는다. 저자는 물리적 레이어에서 발생하는 미세한 불완전성—즉, 각 ECU의 회로 설계 차이와 케이블·커넥터의 제조 공정 변동—을 ‘디지털‑아날로그 혼합 지문’으로 활용한다. 신호 모델을 y_{ij}(t)=h_j(t)*S_i(t) 로 정의하고, 여기서 h_j(t)는 물리 채널의 임펄스 응답, S_i(t)는 i번째 ECU가 출력하는 전압 파형이다. 동일한 메시지를 전송하더라도 h_j와 S_i의 결합 형태가 미세하게 달라지므로, 수집된 파형에서 채널·ECU 고유의 통계적 패턴을 추출할 수 있다.
특징 추출 단계에서는 LibXtract 라이브러리를 이용해 40개의 원시 특성을 산출한 뒤, FEAST 툴박스의 공동 상호 정보(JMI) 기준으로 중요도를 평가한다. 결과적으로 시간 영역에서는 최대·최소값, 평균, 분산, 왜도, 첨도 6가지, 주파수 영역에서는 스펙트럼 표준편차, 스펙트럼 왜도·첨도, 스펙트럼 중심, 불규칙성‑K 등 5가지가 선택되어 총 11차원 피처 벡터를 구성한다.
분류기 설계는 다층 퍼셉트론(MLP) 신경망으로, 입력층에 11개의 피처, 은닉층 2개(노드 수는 논문에 명시되지 않았으나 실험적으로 최적화), 출력층에 채널(16개) 혹은 ECU(4개) 클래스를 두었다. 데이터는 65%를 학습, 35%를 테스트에 사용했으며, 각 채널·ECU 조합당 144 000개의 샘플을 수집하였다. 실험 결과, 채널 식별 정확도는 95.2%, ECU 식별 정확도는 98.3%에 도달했으며, 이는 물리적 지문이 충분히 안정적이고 구별 가능함을 입증한다.
또한, 실험 환경을 동일 온도·전압 조건으로 제한함으로써 외부 요인의 영향을 최소화했으며, 다양한 케이블 종류(GXL, TXL, SAE J1939‑15)와 길이(0.5 m~5 m)를 포함해 실제 차량 배선 특성을 반영하였다. 이러한 설계는 향후 실시간 IDS(침입 탐지 시스템) 혹은 인증 메커니즘에 물리적 지문을 보조 수단으로 활용할 수 있는 기반을 제공한다. 다만, 온도 변화, 전원 전압 변동, 노이즈 등 실운전 상황에서의 강인성 검증이 부족하고, 신경망 모델의 과적합 위험 및 실시간 처리 비용에 대한 논의가 추가로 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기