연결 차량 환경에서 작업 구역 여행시간 예측을 위한 시뮬레이션 모델
초록
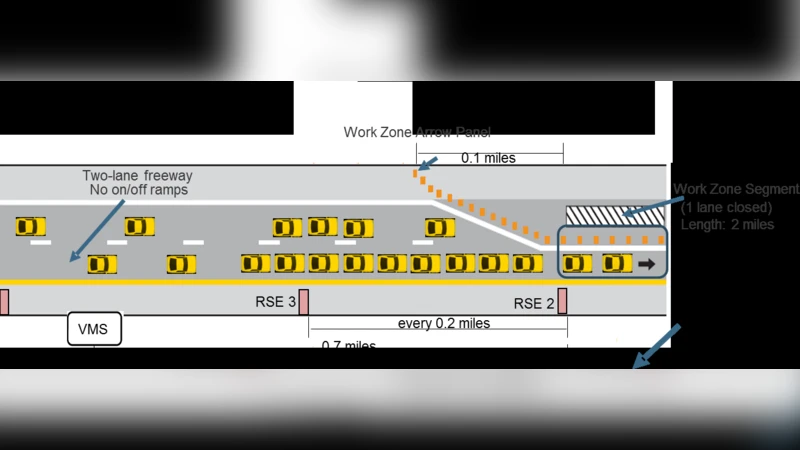
본 논문은 연결 차량(V2I) 기술을 활용해 작업 구역 내 이동 시간을 실시간으로 측정·예측하는 시뮬레이션 모델을 제시한다. NY 주 104번 도로의 교통 수요를 기반으로 PARAMICS 환경에서 12개의 이동식 roadside unit(RSU)을 배치하고, 16개의 교통 변수들을 추출해 선형 회귀, MARS, 단계별 회귀, Elastic Net 네 가지 모델을 비교하였다. 결과는 네 모델이 RMSE 측면에서 유사한 성능을 보였으며, 특히 단계별 회귀는 상류와 작업 구역 끝 두 개 RSU만으로도 충분한 예측 정확도를 달성함을 확인했다.
상세 분석
이 연구는 전통적인 고정 루프 검지기 대신 이동식 RSU를 이용해 작업 구역의 교통 흐름을 실시간으로 파악하고, 이를 기반으로 여행시간을 예측하는 새로운 접근법을 제안한다. 먼저, NY 주 104번 고속도로의 실제 교통량 데이터를 활용해 PARAMICS 시뮬레이션 모델을 구축했으며, 이는 실제 도로의 차선 구성, 작업 구역 길이, 차단 구간 등을 정밀하게 재현한다. 시뮬레이션에 12개의 RSU를 작업 구역 전후로 고르게 배치했는데, 이는 차량‑인프라 통신(V2I) 범위와 데이터 수집 효율성을 동시에 고려한 설계이다.
시뮬레이션 결과로부터 16개의 변수—예를 들어 각 RSU에서 측정된 평균 속도, 차량 밀도, 흐름량, 점유율, 그리고 구간별 지연시간—를 추출하였다. 변수 선택 과정에서 상관관계 분석과 변수 중요도 평가를 수행했으며, 이는 과적합을 방지하고 모델의 해석 가능성을 높이는 데 기여한다. 네 가지 예측 모델은 각각의 장단점을 갖는다. 선형 회귀는 구현이 간단하고 해석이 용이하지만 비선형 관계를 포착하기 어렵다. MARS는 자동으로 비선형 및 상호작용 효과를 탐지해 복잡한 패턴을 모델링할 수 있지만, 모델 복잡도가 증가하면 해석이 어려워진다. Elastic Net은 L1·L2 정규화를 결합해 변수 선택과 다중공선성 문제를 동시에 해결하지만, 최적의 하이퍼파라미터 튜닝이 필요하다. 단계별 회귀는 변수의 통계적 유의성을 기준으로 단계적으로 포함·제외함으로써 가장 간결한 모델을 도출한다.
실험 결과는 네 모델 모두 RMSE가 1.2~1.4초 수준으로 거의 차이가 없음을 보여준다. 특히 단계별 회귀는 두 개의 핵심 RSU(상류와 작업 구역 끝)만을 사용해 동일한 예측 정확도를 유지했으며, 이는 RSU 설치 비용과 유지보수 부담을 크게 낮출 수 있음을 시사한다. 또한, 변수 중요도 분석을 통해 작업 구역 진입 직전의 속도와 작업 구역 종료 시점의 차량 밀도가 여행시간에 가장 큰 영향을 미친다는 점을 확인했다. 이러한 결과는 실무에서 RSU 배치 최적화를 위한 구체적인 가이드라인을 제공한다.
하지만 연구에는 몇 가지 제한점도 존재한다. 첫째, 시뮬레이션 기반 데이터이므로 실제 현장 환경에서 발생할 수 있는 비정상적인 사건(예: 사고, 급격한 날씨 변화)을 완전히 반영하지 못한다. 둘째, RSU 간 통신 지연이나 패킷 손실을 고려하지 않았으며, 이는 실시간 예측 정확도에 영향을 줄 수 있다. 셋째, 모델은 단일 작업 구역에만 적용되었으며, 복수 작업 구역이 연속적으로 발생하는 복합 상황에 대한 확장성 검증이 필요하다. 향후 연구에서는 실제 현장 데이터를 활용한 검증, V2V 데이터와의 융합, 그리고 다중 작업 구역 시나리오에 대한 모델 일반화 작업이 요구된다.
댓글 및 학술 토론
Loading comments...
의견 남기기