GPS 탐지 데이터 지연시간 측정 방법론
초록
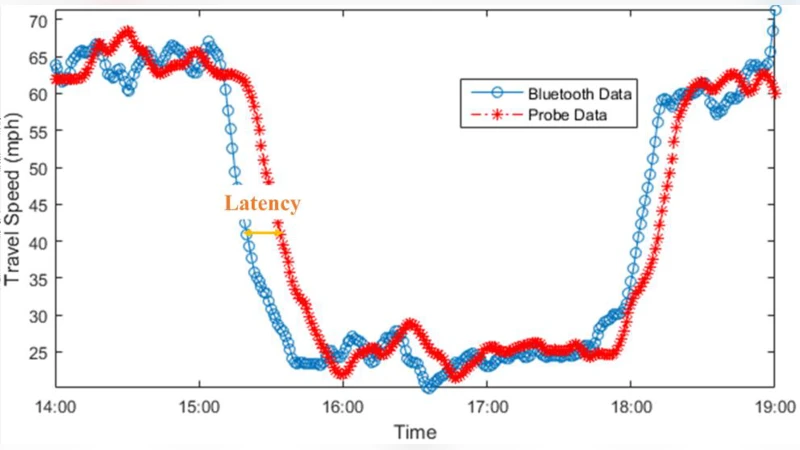
본 논문은 블루투스 재식별 데이터를 기준으로 GPS 기반 프로브 데이터의 지연시간(Latency)을 정량화하는 절차를 제시한다. 데이터 전처리·보간·스무딩 후, 1분 단위 시간 이동을 반복하면서 절대·제곱 수직 거리와 상관계수 세 가지 적합 지표를 활용해 최소 오차를 찾는다. 남부 캐롤라이나 I‑85·I‑26 구간에서 2주간 수집한 실험 데이터를 통해 시간대·구간·속도 변화에 따른 지연 특성을 분석한다.
상세 분석
이 연구는 실시간 교통 운영에서 가장 핵심적인 품질 지표 중 하나인 ‘지연시간’을 체계적으로 측정하기 위한 프레임워크를 구축한다. 먼저 블루투스 센서를 이용해 차량 MAC 주소를 매칭함으로써 구간별 실제 통행시간을 직접 관측한다. 이때 두 센서 사이의 거리와 재식별 시점을 이용해 공간 평균 속도를 계산하고, 1분 간격으로 집계한다. 데이터 품질을 보장하기 위해 속도 이상치(±1.5σ)와 변동계수(COV>1)를 제거하는 다단계 필터링을 적용한다. 결측 구간이 5분 이하일 경우 인접 관측값 평균으로 보간하고, 5분 초과는 분석 대상에서 제외한다.
스무딩 단계에서는 MATLAB의 filtfilt 함수를 이용해 전·후방 필터링을 동시에 수행함으로써 인위적인 위상 지연을 최소화한다. 이동 평균 윈도우는 5분이며, 가중치를 부여해 급격한 변동을 완화한다.
지연시간 측정은 ‘시간 오프셋’이라는 변수에 대해 0분부터 상한까지 1분 단위로 순차 탐색한다. 각 오프셋에 대해 세 가지 적합도 함수를 계산한다. (1) 절대 수직 거리(AVD) = |BT – Probe|의 합, (2) 제곱 수직 거리(SVD) = |BT – Probe|²의 합, (3) 피어슨 상관계수(COR) = corr(BT, Probe_shifted). 세 지표 중 최소값(AVD, SVD) 혹은 최대값(COR)을 제공하는 오프셋을 최적 지연시간으로 정의한다.
실험에서는 남부 캐롤라이나 I‑85(7.07 mi)와 I‑26(4.67 mi) 구간을 선택, 2015년 12월 3일15일 2주간 양방향 데이터를 수집하였다. GPS 프로브 데이터는 민간 벤더로부터 1분 간격 속도 정보를 받아 사용했으며, 블루투스 데이터와 동일한 구간·시간 해상도로 변환하였다. 결과는 다음과 같다. (①) 피크 시간대(출퇴근)에는 평균 지연이 46분으로, 비피크 시간대보다 짧았다. (②) 구간을 짧게(0.5 mi) 나눌 경우 지연이 약 1분 가량 증가했는데, 이는 프로브 데이터가 구간 평균 속도를 산출하는 과정에서 발생하는 집계 지연 때문이다. (③) 급격한 속도 감소 구간에서는 지연이 23분 정도 감소했지만, 속도 회복 구간에서는 57분까지 늘어나는 비대칭 현상이 관찰되었다. 이는 프로브 데이터 처리 엔진이 ‘감소’를 빠르게 감지하지만 ‘회복’은 과거 데이터와의 가중 평균에 의존하기 때문이다.
이 방법론의 강점은 (1) 블루투스와 같은 현장 기반 데이터를 직접 기준으로 삼아 실제 차량 흐름을 반영한다는 점, (2) 다중 적합도 함수를 통해 단일 지표에 의존하지 않아 보다 견고한 지연 추정이 가능하다는 점이다. 반면 제한점으로는 (가) 블루투스 재식별률이 낮은 구간에서는 샘플 수가 부족해 통계적 신뢰도가 떨어진다, (나) 1분 간격 보간·스무딩이 원본 데이터의 급격한 변동을 억제해 실제 지연보다 과소/과대 평가될 위험이 있다, (다) 상관계수는 선형 관계에만 민감하므로 비선형 교통 패턴에서는 부정확할 수 있다. 향후 연구에서는 (i) 다중 센서(루프, 카메라)와 결합한 복합 기준을 도입하고, (ii) 베이지안 필터링을 활용해 실시간 지연 추정의 불확실성을 정량화하며, (iii) 실시간 운영 시스템에 적용 가능한 자동화 파이프라인을 구축하는 방향을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기