동적 잡음 환경에서 칼만 타켄스 하이브리드 필터
본 논문은 파라미터 모델이 없을 때도 딜레이 좌표를 이용한 비모수적 재구성(Takens 방법)과 칼만 필터 업데이트를 결합한 Kalman‑Takens 필터를 제안한다. 동적(시스템) 잡음이 존재하는 상황에서도 파라미터 기반 필터와 비슷한 성능을 보이며, 적응적 알고리즘을 통해 관측 잡음과 시스템 잡음의 공분산(Q, R)을 동시에 추정한다. Lorenz‑63 SDE 실험을 통해 방법의 유효성을 입증한다.
저자: Franz Hamilton, Tyrus Berry, Timothy Sauer
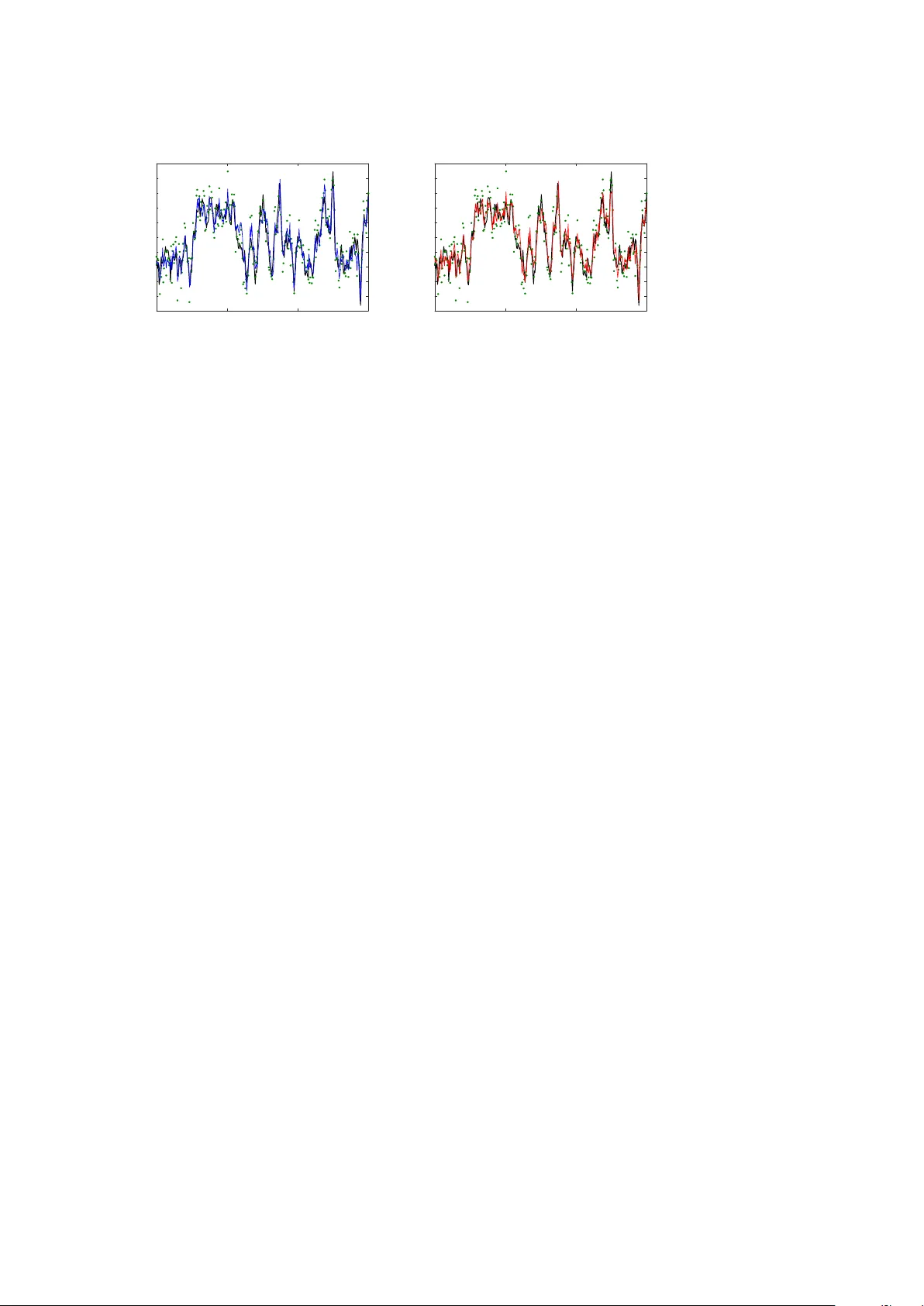
본 논문은 현대 물리·공학 분야에서 데이터 동화(data assimilation)의 중요성이 커짐에 따라, 파라미터 모델이 없거나 불완전한 경우에도 효과적인 필터링 방법을 제시한다. 서론에서는 기존 칼만 필터와 그 확장형인 EKF, EnKF가 파라미터 기반 모델 f와 관측 함수 g가 알려진 경우에만 적용 가능함을 지적하고, 실제 많은 자연·사회 현상에서는 이러한 모델이 부재하거나 큰 오차를 포함한다는 점을 강조한다. 특히, 지연 좌표 재구성(Takens embedding) 이론은 관측 시계열 yₖ만으로도 원래 시스템의 위상 공간을 복원할 수 있음을 보여주지만, 기존 연구는 주로 결정론적 시스템에 한정돼 있었으며 동적 잡음에 대한 이해가 부족했다.
이에 저자들은 Takens 방법과 칼만 필터를 결합한 “Kalman‑Takens 필터”를 개발한다. 핵심 아이디어는 관측값 yₖ를 이용해 지연 벡터 xₖ =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기