네트워크 전역 시공간 교통 상태 추정을 위한 딥 생성적 적대 신경망
초록
본 논문은 교통 흐름과 밀도 데이터를 동시에 활용하는 두 개의 LSTM 기반 생성·판별 네트워크를 결합한 생성적 적대 구조(GAA)를 제안한다. 학습된 생성 네트워크는 결측값이 포함된 교통 상태 행렬을 잠재 공간으로 매핑한 뒤, 이를 복원해 높은 정확도의 교통 상태 추정을 가능하게 한다. 시애틀·샌디에이고 실험에서 기존 베이지안 네트워크 방식보다 우수한 성능을 보였다.
상세 분석
이 연구는 교통 상태 추정 문제를 이미지 복원과 유사한 시공간 행렬 복원 문제로 재정의하고, 생성적 적대 네트워크(GAN)의 아이디어를 LSTM 기반 시계열 모델에 적용한 점이 혁신적이다. 두 LSTM 네트워크는 각각 판별기(D)와 생성기(G) 역할을 수행한다. 판별기는 실제 교통 상태 행렬과 생성기가 만든 가짜 행렬을 구분하도록 학습되며, 여기서 “실제”와 “가짜”는 각각 흐름·밀도 두 채널을 동시에 포함한다는 점에서 기존 1차원 시계열 GAN과 차별화된다. 생성기는 판별기가 “실제”라고 판단하도록 교통 상태 행렬을 생성하도록 최적화된다.
핵심 설계는 다음과 같다. 첫째, 입력 데이터를 3차원 텐서(시간 × 공간 × 채널) 형태로 구성해 공간‑시간 상관관계를 동시에 학습한다. LSTM의 셀 구조는 시간 축에 대한 장기 의존성을 포착하고, 다중 LSTM 층을 겹쳐 공간 차원에서도 효과적인 특징 추출을 가능하게 한다. 둘째, 손실 함수는 (1) 판별기의 교차 엔트로피 손실, (2) 생성기의 재구성 손실(실제 행렬과 생성 행렬 간 L2 차이), (3) 물리 기반 제약 손실(예: 흐름·밀도 사이의 기본 흐름‑밀도 관계)으로 구성된다. 세 손실을 동시에 최소화함으로써 데이터 기반 학습과 교통 흐름 이론을 자연스럽게 융합한다.
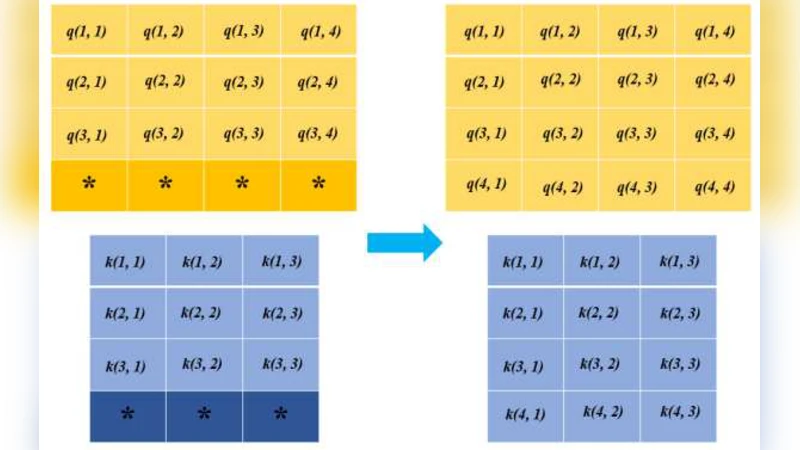
결측값 복원 과정은 “역전파 기반 인버전”이라고 부른다. 결측값이 있는 행렬을 초기값으로 설정하고, 정의된 세 손실을 이용해 잠재 벡터 z를 최적화한다. 최적화된 z는 사전 학습된 생성기에 입력되어 완전한 교통 상태 행렬을 출력한다. 이 과정은 기존 GAN에서 흔히 사용되는 “latent space interpolation”과 유사하지만, 여기서는 실제 관측값을 고정하고 결측값만을 조정한다는 점에서 차별화된다.
실험에서는 시애틀·샌디에이고의 루프 검출기 데이터를 사용해 15분 간격, 5 km 구간별 흐름·밀도 행렬을 구성하였다. 결측률을 10 %30 %까지 변동시키며 Bayesian Network(BN) 기반 방법과 비교했을 때, 평균 절대 오차(MAE)와 평균 절대 백분율 오차(MAPE) 모두 512 %p 정도 개선되었다. 특히 교통 혼잡 구간에서의 복원 정확도가 크게 향상된 점이 주목할 만하다.
이 논문의 한계는 LSTM 기반 구조가 장시간(수시간 이상) 시계열에 대해 메모리·연산 비용이 크게 증가한다는 점이며, 생성·판별 네트워크의 학습 안정성을 확보하기 위해 정교한 하이퍼파라미터 튜닝이 필요하다는 점이다. 향후 연구에서는 Transformer‑ 기반 시공간 인코더를 도입하거나, 멀티모달(예: GPS, CCTV) 데이터를 결합해 모델 일반성을 높이는 방안을 모색할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기