단순 다각형 내 중간 규모 점 집합을 위한 지오데식 보로노이 다이어그램
초록
이 논문은 단순 다각형 안에 존재하는 m 개의 점에 대해, 최근접점, 고차원(순서‑k) 및 최멀점 보로노이 다이어그램을 효율적으로 계산하는 새로운 알고리즘을 제시한다. 특히 m ≤ n/ polylog n 인 경우 기존 최선 알고리즘보다 빠른 O(n + m log m log² n) (최근접점), O(k² m log m log² n + min{nk, n(m‑k)}) (순서‑k) 및 O(n + m log m + m log² n) (최멀점) 시간을 달성한다. 이 결과는 Mitchell이 제기한 질문에 대한 부분적인 해답을 제공한다.
상세 분석
본 논문은 지오데식 거리(metric) 하에서 정의되는 보로노이 다이어그램을 단순 다각형 내 점 집합에 적용하는 문제를 다룬다. 기존 연구에서는 O((n+m) log (n+m)) 시간 복잡도를 갖는 알고리즘이 최선이었으며, 특히 m ≈ n 일 때는 최적이라고 알려졌다. 그러나 m 이 n 보다 현저히 작을 경우, 즉 m ≤ n/ polylog n 구간에서는 아직 충분히 빠른 방법이 없었다. 저자들은 이 구간을 목표로 “다각형 스윕(paradigm)”과 “위상 구조(topological structure)” 개념을 도입한다.
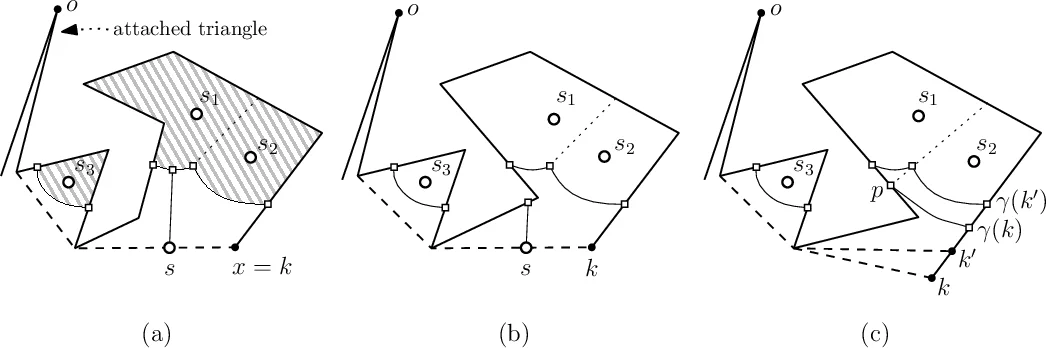
먼저, 다각형의 경계 위에 고정점 o 를 잡고, 다른 점 x 를 시계방향으로 이동시키며 o 와 x 사이의 최단 경로와 경계 구간이 이루는 부분 다각형에 대해 점 집합의 보로노이 다이어그램을 점진적으로 구축한다. 이 과정에서 실제 다이어그램을 바로 계산하는 것이 아니라, 셀 간 인접 관계만을 나타내는 위상 구조를 먼저 구한다. 위상 구조는 전체 다이어그램보다 복잡도가 낮으며, 이를 통해 O(polylog {n,m}) 시간 안에 구조 변화를 감지한다.
핵심 기술은 “세 점으로부터 동일한 지오데식 거리를 갖는 점”을 효율적으로 찾는 알고리즘이다. 기존에는 O(n) 시간이 필요했지만, Guibas‑Hershberger의 O(log n) 최단 경로 데이터 구조를 활용해 O(log² n) 시간에 해결한다. 이 서브루틴을 이용해 스윕 중 발생하는 각 이벤트(위상 구조 변화)를 빠르게 처리한다.
알고리즘 별 복잡도는 다음과 같다.
- 최근접점 보로노이: O(n + m log m log² n). m ≤ n/ log³ n 이면 하한 Ω(n + m log m) 에 도달해 최적이다.
- 순서‑k 보로노이: O(k² m log m log² n + min{nk, n(m‑k)}). 복합도 Θ(k(m‑k) + min{nk, n(m‑k)}) 를 새롭게 증명한다.
- 최멀점 보로노이: O(n + m log m + m log² n). m ≤ n/ log² n 구간에서 최적성을 확보한다.
또한 위상 구조를 이용해 동적 점 집합에 대한 최근접·최멀점 질의를 지원한다. 점 집합을 √m 개의 균등 부분집합으로 나누고, 각 부분에 대해 위상 구조를 미리 계산하면, 삽입·삭제는 O(√m log m log² n) 시간, 질의는 O(√m log(n+m)) 시간에 처리 가능하다. 이는 기존 정적 알고리즘에 비해 동적 환경에서 실용적인 성능을 제공한다.
전체적으로, 저자들은 지오데식 보로노이 다이어그램의 구조적 특성을 정밀히 분석하고, 이를 기반으로 복잡도 하한에 근접한 알고리즘을 설계함으로써, 특히 m 이 n 에 비해 작을 때의 성능 격차를 크게 줄였다. 이는 Mitchell이 제기한 “최근접점·최멀점 보로노이 다이어그램의 시간 복잡도 차이를 메우는” 문제에 대한 중요한 진전이며, 향후 다각형 기반 로봇 경로 계획, GIS, 컴퓨터 그래픽스 등 다양한 응용 분야에 직접적인 영향을 미칠 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기