텐서 완성을 이용한 효율적이고 강인한 실내 위치추정
본 논문은 실내 Wi‑Fi RSS 지문 데이터베이스 구축에 소요되는 인력·시간을 크게 줄이면서, 이상치(아노말리)로 인한 정확도 저하를 보완하는 텐서 완성 기반 방법을 제안한다. 3차원 텐서 모델링, 저‑계수 텐서와 희소 아노말리 텐서의 분해, ADMM을 이용한 텐서‑핵노름 최소화 최적화를 통해 부분 관측만으로도 고품질 라디오맵을 복원하고, 기존 방법 대비 10% 샘플링으로 4% 오류율을 달성한다.
저자: Yu Zhang, Xiao-Yang Liu
본 논문은 실내 위치 기반 서비스(LBS)에서 핵심적인 역할을 하는 RF 지문 기반 실내 위치추정의 두 가지 주요 문제—지문 데이터베이스 구축에 소요되는 높은 인력·시간 비용과 측정값에 포함되는 이상치(아노말리)로 인한 정확도 저하—를 동시에 해결하고자 한다. 이를 위해 저자들은 다음과 같은 일련의 접근법을 제시한다.
1. **3‑차원 텐서 모델링**
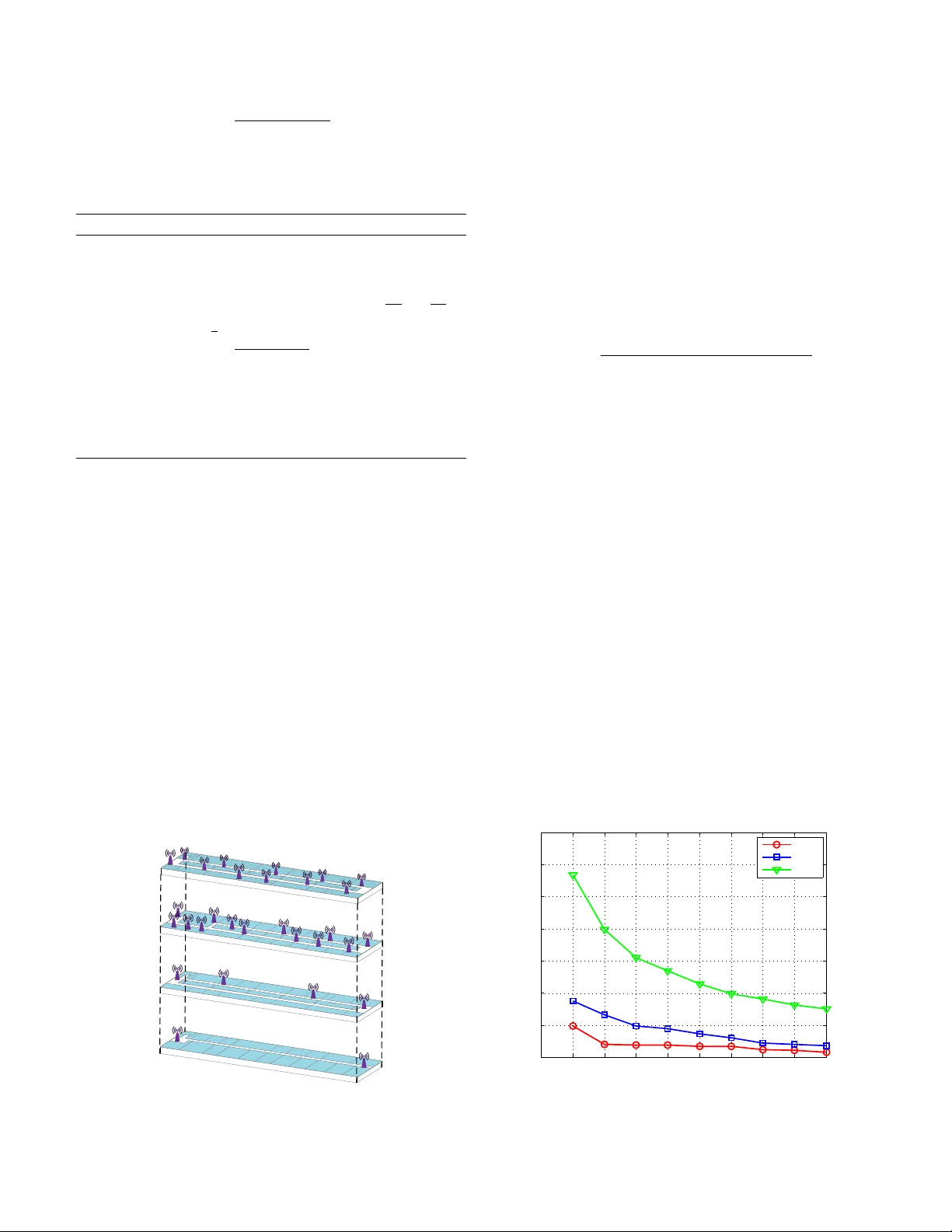
실내 공간을 N1 × N2 격자로 분할하고, 각 격자점(i,j)에서 N3개의 Wi‑Fi AP에 대한 RSS 값을 수집한다. 이 데이터를 (i,j,k) 형태의 텐서 T∈ℝ^{N1×N2×N3} 로 정의한다. 여기서 한 “튜브”(tube)는 특정 위치(i,j)에 대한 모든 AP의 RSS 벡터를 의미한다. 텐서‑t‑product, t‑SVD, tubal‑rank 등 최신 텐서 대수 개념을 도입해, 실제 RSS가 공간적·주파수적 상관관계에 의해 저‑계수(tubal‑rank r) 구조를 가진다고 가정한다.
2. **아노말리 포함 모델**
현장 측정에서는 사람 이동, 기기 오작동 등으로 인해 일부 RSS 값이 급격히 변하는 아노말리가 발생한다. 이를 희소 텐서 Y로 모델링하고, 원본 저‑계수 텐서 X와의 선형 합 T = X + Y 로 표현한다. Y는 ℓ_{1,1,2} 노름(튜브 단위 ℓ2, 전체는 ℓ1)으로 희소성을 강제한다.
3. **부분 관측 및 문제 정의**
전체 격자점 중 일부 Ω만을 샘플링해 관측 텐서 M = P_Ω(T) 를 얻는다. 여기서 P_Ω는 Ω에 해당하는 원소만 남기고 나머지는 0으로 만드는 연산이다. 목표는 (i) 관측된 위치에서는 복원된 X와 Y가 원본과 일치하도록, (ii) X는 최소 tubal‑rank, (iii) Y는 희소하도록 하는 최적화 문제를 푸는 것이다. 원문식 (4)는 rank(X)+λ‖Y‖_{1,1,2} 최소화를 제약식 M = P_Ω(X)+P_Ω(Y) 로 정의한다.
4. **Convex 완화 및 ADMM 해결**
tubal‑rank는 조합적이므로, 이를 텐서‑핵노름(‖·‖_{TNN}) 으로 완화한다. 최종 문제 (6)는 convex 형태가 되며, ADMM을 적용해 변수 X, Z(보조 변수), Y, 라그랑주 승수 A, B를 순차적으로 업데이트한다.
- **X‑업데이트**: (I+P_Ω)^{-1} 를 이용한 닫힌 형태 해를 얻는다.
- **Z‑업데이트**: ‖Z‖_{TNN}+ (ρ/2)‖Z−(X+B/ρ)‖_F^2 를 최소화하는데, 이는 blkdiag(·) 형태의 행렬 핵노름 최소화와 동일하므로 singular value soft‑thresholding 으로 해결한다.
- **Y‑업데이트**: λ‖Y‖_{1,1,2}+ (µ/2)‖M−P_Ω(X+Y)‖_F^2 를 최소화하며, 각 튜브에 대해 ℓ2‑norm soft‑thresholding을 적용한다.
- **라그랑주 승수 업데이트**: 표준 ADMM 방식으로 A와 B를 갱신한다.
5. **실험 설정 및 결과**
- **데이터 수집**: 80 m × 20 m 사무실 내부에서 30개의 AP를 이용해 RSS를 측정, 전체 격자점 수는 N1×N2=... (논문에 구체적 수치 기재).
- **복원 정확도**: 무아노말리 상황에서 40 % 샘플링으로 정확히 복원 가능함을 시연하고, 1 %·5 % 아노말리 비율을 추가했을 때 복원 오차가 크게 증가함을 그래프(Fig.1)로 보여준다. 제안 방법은 10 % 샘플링에서도 평균 복원 오차 < 4 %를 달성, 기존 최첨단 방법은 60 % 샘플링이 필요했다.
- **위치 추정 성능**: 복원된 라디오맵을 K‑NN 기반 위치 추정에 적용했을 때 평균 위치 오차가 0.6 m(≈20 % 개선) 감소하였다. 이는 복원된 RSS가 실제 현장 환경을 더 정확히 반영함을 의미한다.
6. **기여 및 향후 연구**
- **기여**: (1) 실내 RSS 지문을 3‑차원 텐서로 모델링한 최초 연구, (2) 아노말리 존재 하에서도 텐서‑핵노름 기반 강인 복원 프레임워크 설계, (3) ADMM을 통한 효율적 알고리즘 구현 및 실제 환경 검증.
- **향후 과제**: 비균일 가중치 샘플링, 온라인/실시간 업데이트, 다중 무선 기술(LiDAR, BLE)과의 융합, 그리고 대규모 상업 환경에서의 확장성 검증 등이 제시된다.
결론적으로, 이 논문은 텐서 완성 이론을 실내 위치추정에 적용함으로써, 현장 측정 비용을 크게 절감하고, 이상치에 강인한 라디오맵을 제공한다는 점에서 실내 LBS 분야에 중요한 기술적 진보를 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기