화성 가상천문관: 산타마리아 분화구 3D 시각화 프로토타입
초록
본 논문은 Unity3D 기반 가상천문관(Virtual Astronaut, VA)을 구현하여, 궤도와 Opportunity 로버의 다중 임무 데이터를 통합한 산타마리아 분화구 3D 가상 환경을 제공한다. 사용자는 지형·지질·광물 정보를 실시간으로 탐색·측정하고, 로버 이동을 애니메이션으로 재현함으로써 과학적 해석과 교육에 활용할 수 있다.
상세 분석
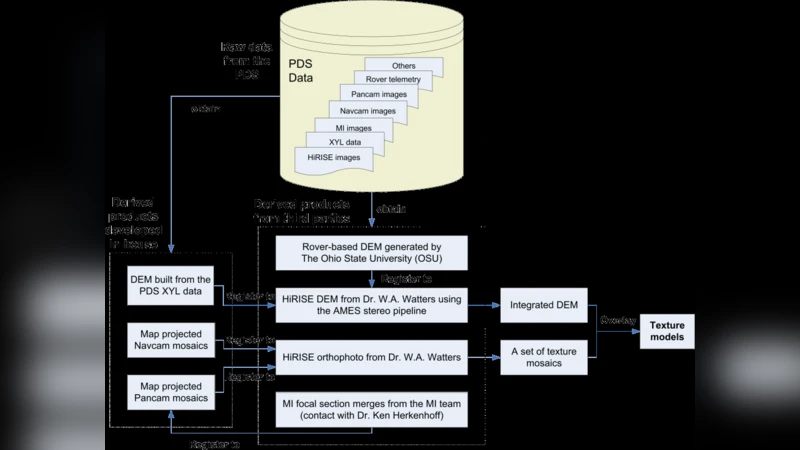
본 연구는 화성 탐사 데이터의 통합 시각화라는 난제를 Unity3D 게임 엔진을 활용해 해결하고자 한다. 첫 번째 핵심은 궤도 이미지(HiRISE, CTX)와 로버 현장 사진(Mastcam, Pancam)의 좌표계 정합이다. 저자들은 Mars2000 좌표계와 로버 자체 좌표계를 변환하여 동일한 3D 메쉬 위에 텍스처를 매핑함으로써, 서로 다른 해상도와 관측 각도를 가진 데이터를 하나의 가상 공간에 겹쳐 놓았다. 두 번째는 지형 모델링이다. 고해상도 디지털 지형 모델(DTM)을 포인트 클라우드에서 추출하고, 이를 메쉬화한 뒤 LOD(Level of Detail) 기법을 적용해 실시간 렌더링 성능을 확보하였다. 세 번째는 사용자 인터페이스 설계이다. 사용자는 마우스/키보드 혹은 터치 입력으로 자유롭게 이동하면서, 특정 지점에 대한 스펙트럼 데이터, 광물 조성, 그리고 로버의 현장 관측 기록을 팝업 형태로 조회할 수 있다. 또한, 거리·각도 측정 툴을 통해 지형 특성(예: 절벽 높이, 크레이터 직경)을 직접 계산할 수 있다. 네 번째는 로버 주행 애니메이션 구현이다. 로버의 실제 주행 경로와 속도 데이터를 시간축에 맞춰 재생함으로써, 과거 탐사 과정을 시각적으로 재현하고, 사용자가 특정 시점에서 관측된 현장을 즉시 확인하도록 지원한다. 다섯 번째는 과학적 피드백 루프이다. 외부 과학자와 교육 현장 사용자에게 베타 테스트를 진행한 결과, 데이터 정합 오류와 UI 복잡성에 대한 개선 요구가 있었으며, 반면 지형·지질 맥락을 한눈에 파악할 수 있다는 점에서 높은 만족도를 보였다. 이러한 피드백은 차후 버전에서 자동 정합 파이프라인과 맞춤형 교육 모듈을 추가하는 방향으로 반영될 예정이다. 전반적으로 본 연구는 고성능 게임 엔진을 과학 시각화에 적용함으로써, 다중 스케일·다중 센서 데이터를 통합하고, 인터랙티브하게 탐색·분석할 수 있는 플랫폼을 제시한다는 점에서 의미가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기