다중 센서 시스템에서 칼만 필터를 무력화하는 최적 가짜 정보 주입 공격
** 본 논문은 연속적인 가짜 센서 바이어스를 이용해 칼만 필터의 상태 추정 오차를 최대화하는 최적 공격 전략을 이론적으로 도출한다. 전체 바이어스 전력 제한 하에 트레이스와 행렬식 두 가지 목적함수를 사용해 편향 잡음의 상관계수와 센서별 전력 배분을 최적화하고, 1차원 목표 추적 예시를 통해 단일·다중 센서 환경에서의 최적 해를 제시한다. **
저자: Jingyang Lu, Ruixin Niu
**
본 논문은 다중 센서가 연결된 선형 동적 시스템에서 적이 가짜 정보를 지속적으로 주입함으로써 칼만 필터 기반 상태 추정기의 성능을 저하시키는 최적 공격 전략을 체계적으로 분석한다. 연구는 크게 네 부분으로 구성된다.
첫 번째 부분에서는 문제 정의와 기존 연구 동향을 소개한다. 기존 문헌은 주로 정적 시스템이나 단일 시점 공격에 초점을 맞추었으며, 연속적인 바이어스 주입이 칼만 필터에 미치는 장기적인 영향을 다루지는 않았다. 저자들은 이러한 공백을 메우기 위해 연속적인 바이어스 시퀀스 \(\{b_k\}\) 가 시스템에 미치는 영향을 수식적으로 전개한다. 바이어스가 존재할 경우, 측정식은 \(z'_k = H_k x_k + w_k + b_k\) 가 되며, 이로 인해 칼만 필터의 사후 추정 오차는 추가적인 항 \(A_{K+N}\) 를 포함한다. 논문은 \(A_{K+N}\) 를 \(D_m\) 와 바이어스 공분산 \(\Sigma_{K+N-m}\) 의 합으로 표현하고, 바이어스가 평균이 0인 독립 랜덤 변수일 때 평균 제곱 오차(EMSE) \(A_{K+N}= \sum_{m=0}^{N} D_m \Sigma_{K+N-m} D_m^T\) 임을 정리한다. 여기서 \(D_m = \prod_{i=0}^{m-1} B_{K+N-i} W_{K+N-m}\) 는 시스템 전이와 칼만 이득의 곱으로 정의된다.
두 번째 부분에서는 적의 최적화 목표를 두 가지로 설정한다. 첫 번째는 추정 오차 행렬의 트레이스, 즉 전체 평균 제곱 오차를 최대화하는 것이며, 두 번째는 행렬식, 즉 오차 공분산의 부피를 최대화하는 것이다. 두 목표 모두 바이어스 전력 제한 \(\operatorname{tr}(\Sigma)=a^2\) 을 두고, 바이어스 공분산 \(\Sigma\) 와 센서 간 상관계수 \(\rho_{ij}\) 를 설계한다. 트레이스 목표는 \(P_{K|K}\) 와 무관하므로, 바이어스 전력을 가장 큰 가중치를 가진 센서에 집중시키는 것이 최적임을 증명한다. 구체적으로, 각 센서의 가중치 \(c_i = \frac{1/\sigma_{w,i}^2}{\sum_j 1/\sigma_{w,j}^2}\) 를 정의하고, 독립 바이어스( \(\rho_{ij}=0\) ) 상황에서 전체 전력을 \(c_{i^*}\) 가 가장 큰 센서에 할당한다.
행렬식 목표는 보다 복잡하다. 행렬식은 \(P_{K|K}\) 와 직접 연관되므로, 최적 \(\Sigma\) 는 \(P_{K|K}\) 의 고유벡터 방향에 맞춰 바이어스 상관구조를 설계해야 한다. 저자는 라그랑지안 방법을 이용해 \(\max_{\Sigma}\det(P_{K|K}+A_K)\) 문제를 풀고, 최적 해는 \(\Sigma\) 가 \(P_{K|K}\) 와 동일한 고유벡터를 갖고, 각 고유값에 전력을 비례적으로 배분하는 형태임을 보인다. 이는 “적응형 공격”이라 부르며, 시스템이 현재 어느 상태에 더 취약한지를 자동으로 파악한다는 의미다.
세 번째 부분에서는 다중 센서 시스템을 단일 등가 측정으로 변환하는 절차를 제시한다. 센서별 측정 행렬 \(H_i\) 와 잡음 공분산 \(R_i\) 가 동일하거나 전체 시스템이 관측 가능할 경우, 등가 측정 행렬 \(H^e\) 와 등가 잡음 공분산 \(R^e\) 을 각각 \(H^e = I\) 또는 \(H\) 로 설정하고, \(R^e = \left(\sum_i H_i^T R_i^{-1} H_i\right)^{-1}\) 로 도출한다. 이렇게 하면 다중 센서 문제를 단일 센서 형태로 축소할 수 있어, 최적화 식을 간단히 할 수 있다.
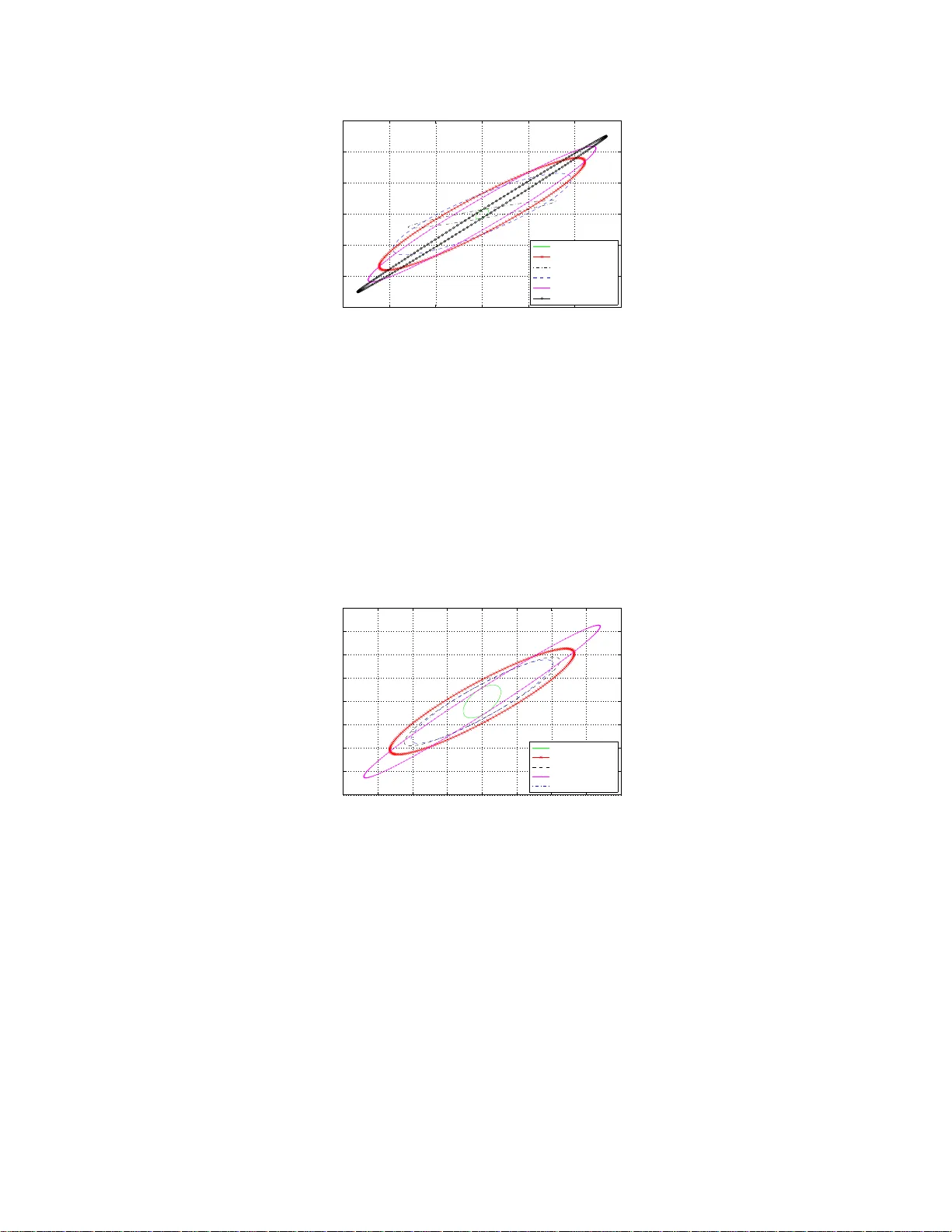
네 번째 부분에서는 구체적인 목표 추적 시뮬레이션을 수행한다. 목표는 1차원 직선 상을 움직이는 물체이며, 상태는 위치와 속도 \(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기