하이브리드 시뮬레이션 안전성 림보 상태와 제로크로싱 문제
초록
본 논문은 하이브리드 모델링에서 발생할 수 있는 시뮬레이션 오류를 ‘안전하지 않은 제로크로싱 검출’과 ‘우연한 결정성’ 두 가지로 규정하고, 이를 ‘림보 상태’라는 개념으로 포착해 오류를 트랩드 에러로 전환하는 방법을 제시한다. Modelica와 Ptolemy II에 대한 부분 구현 사례를 통해 해결 방안을 검증한다.
상세 분석
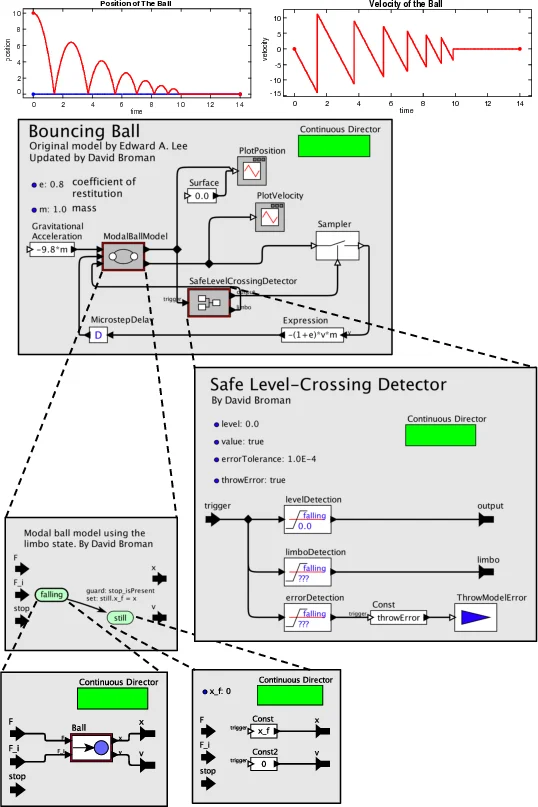
논문은 먼저 시뮬레이션 안전성을 ‘트랩드 에러가 발생하지 않는 시뮬레이션’으로 정의하고, 기존에 모델링 오류로 오인되던 두 종류의 오류를 시뮬레이션 자체의 결함으로 재분류한다. 첫 번째는 제로크로싱 검출기의 수치적 한계 때문에 발생하는 ‘터널링’ 현상이다. 전통적인 제로크로싱 검출기는 교차점을 정확히 찾지 못하고 일정 허용오차를 초과했을 때만 이벤트를 발생시키므로, Zeno 현상과는 별개로 매우 작은 높이에서 충돌을 놓치고 물체가 지면을 관통한다. 이는 모델 자체가 잘못된 것이 아니라 시뮬레이터가 교차점을 ‘감지하지 못한’ 비트러핑 오류이며, 안전한 시뮬레이션 환경에서는 이러한 상황을 감지해 예외를 발생시키거나 시뮬레이션을 중단해야 한다.
두 번째 문제는 ‘우연한 결정성(accidental determinism)’이다. 여러 이벤트가 동시에 발생할 때 모델링 언어가 이벤트 처리 순서를 명시하지 않으면, 시뮬레이터 구현에 따라 서로 다른 결과가 도출될 수 있다. 논문은 세 개의 공이 동시에 충돌하는 예시를 들어, Modelica의 when‑문이 선언적임에도 불구하고 코드 순서에 따라 충돌 후 속도가 달라지는 현상을 보여준다. 이는 모델이 물리적으로는 비결정적이지만 시뮬레이터가 임의의 순서를 강제함으로써 비의도적 결정성을 만든 경우이다.
이를 해결하기 위해 저자는 ‘림보 상태(limbo state)’ 개념을 도입한다. 시뮬레이션이 오류 상황(제로크로싱 미감지, 동시 이벤트 충돌 등)을 탐지하면 즉시 정상 실행 흐름을 중단하고 ‘림보’라는 중간 상태로 전이한다. 모델러는 림보 상태에서 오류를 처리할 수 있는 로직을 제공하거나, 시뮬레이션을 강제 종료하고 명시적인 트랩드 에러를 보고하도록 설계한다. 이렇게 하면 오류가 은폐되지 않고, 원인 분석과 디버깅이 가능해진다.
논문은 이 아이디어를 Modelica와 Ptolemy II에 부분적으로 구현하였다. Modelica에서는 when‑문 내부에 ‘limbo’ 블록을 삽입해 교차점 감지 실패 시 예외를 발생시키고, Ptolemy II에서는 이벤트 스케줄러에 동시 이벤트 감지를 위한 우선순위 검증을 추가했다. 실험 결과, 기존에 발생하던 터널링과 비정상적인 충돌 순서 문제가 모두 억제되었으며, 시뮬레이션 결과의 재현성이 크게 향상되었다.
이러한 접근은 하이브리드 시뮬레이션 환경에서 ‘모델링 오류’와 ‘시뮬레이션 오류’를 명확히 구분하고, 시뮬레이션 엔진 자체에 안전 메커니즘을 내장함으로써 신뢰성 높은 시뮬레이션 파이프라인을 구축하는 데 기여한다.
댓글 및 학술 토론
Loading comments...
의견 남기기