밀리미터파 차량‑인프라 통신을 위한 빔 스위칭 설계 효율화
초록
본 논문은 차량이 RSU에 진입할 때 DSRC를 통해 전달받는 위치·속도 추정값의 오차가 빔 정렬에 미치는 영향을 분석한다. 빔 폭(또는 빔 수)과 빔 간 겹침 비율이라는 두 설계 파라미터를 ‘동일 빔폭’과 ‘동일 커버리지’ 두 방식으로 구성하고, 평균 데이터율과 평균 정지 시간(아웃지)을 성능 지표로 삼는다. 제안된 Beam Design Efficiency (BDE) 지표를 통해 오차 상황에서 어느 설계가 더 효율적인지 판단한다. 실험 결과, 빔 수가 적당히 작을 때는 동일 커버리지가 우수하지만, 빔 수가 많아지면 겹침으로 인한 정지 시간이 급증해 동일 빔폭 설계가 더 효율적임을 확인한다.
상세 분석
본 연구는 mmWave V2I 시스템에서 빔 정렬 비용을 최소화하기 위해 DSRC 기반 차량 위치·속도 정보를 활용하는 기존 접근법의 한계를 짚는다. 차량이 RSU 커버리지를 통과하는 동안 한 번만 전송되는 추정값은 가우시안 잡음(평균 0, 분산 σ²_v)으로 모델링되며, 이 오차가 빔 스위칭 시점과 빔 선택에 직접적인 영향을 미친다. 논문은 두 가지 빔 설계 전략을 제시한다. 첫 번째는 동일 빔폭(equal‑beam) 방식으로, 모든 빔의 안테나 폭 θ_b를 동일하게 설정하고 빔 수 N_b에 따라 전체 커버리지를 조정한다. 두 번째는 동일 커버리지(equal‑coverage) 방식으로, 각 빔이 차지하는 지리적 구간을 동일하게 하여 빔폭이 N_b에 따라 가변한다. 두 설계 모두 빔 간 겹침(overlap) 비율을 0~30% 범위에서 조절할 수 있다.
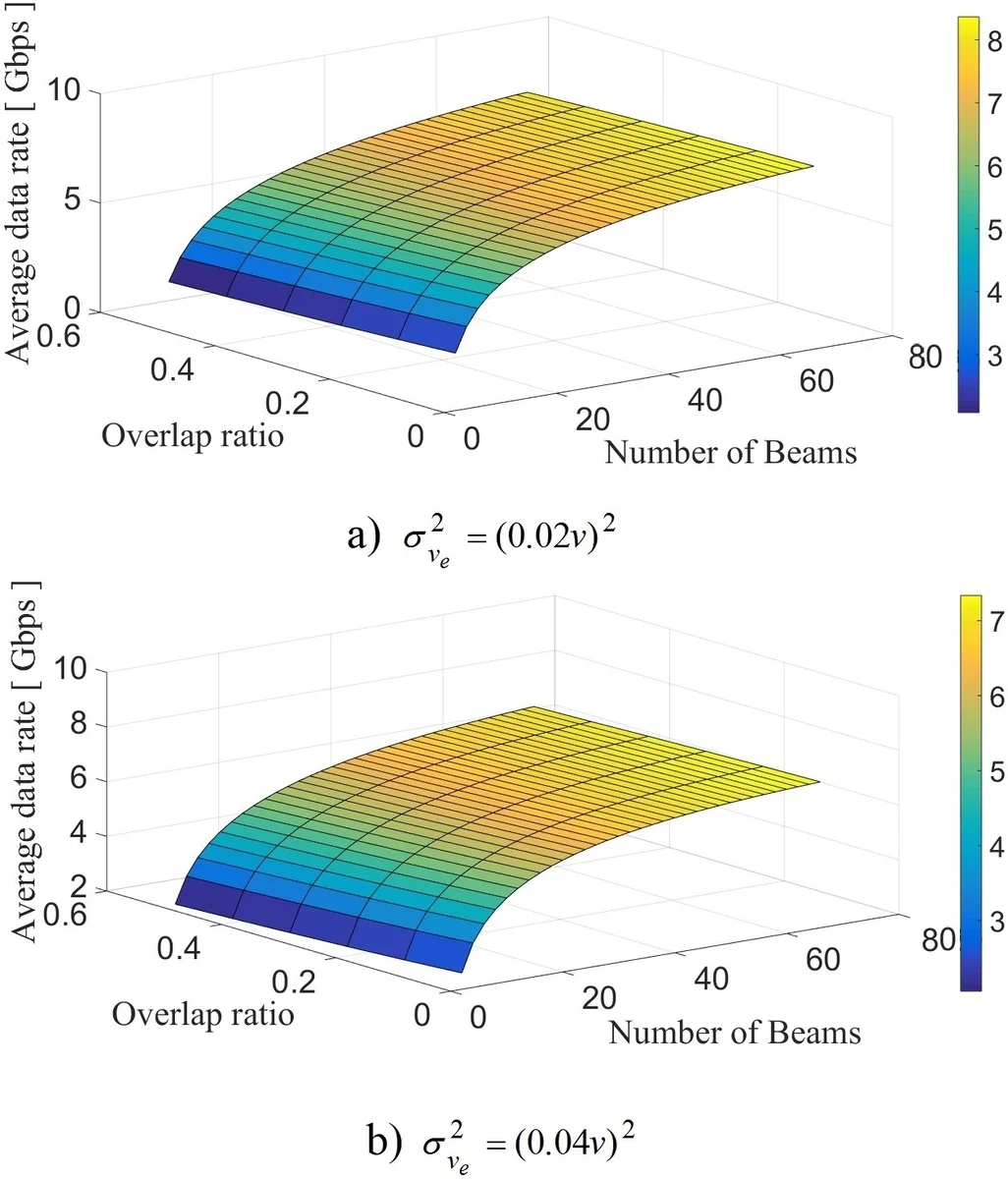
성능 평가는 **평균 데이터율(D̅)**와 평균 정지 시간(T_out) 두 지표로 이루어진다. 데이터율은 아날로그 빔포밍 가정 하에 수신 전력 P_r(t,θ_b)와 SNR ρ(t,θ_b)를 이용해 Shannon 용량 C(t,θ_b)=B·log₂(1+ρ)로 계산하고, 각 빔이 차량에 할당되는 시간 구간을 추정 속도 ˆv와 실제 속도 v의 차이 v_e를 반영해 적분한다. 정지 시간은 빔이 차량을 놓치는 구간을 Q‑함수와 적분식으로 구해, 전체 통과 시간 대비 비율로 표현한다.
시뮬레이션 결과는 다음과 같다. (1) 데이터율 측면에서는 동일 커버리지가 동일 빔폭 대비 약 1.5배 높은 피크 값을 보였으며, 빔 수 N_b가 증가할수록 데이터율이 상승한다. 그러나 (2) 정지 시간은 빔 수가 늘어날수록 급격히 증가해, 특히 동일 커버리지 설계에서 그 상승 폭이 더 크다. 이는 빔 폭이 좁아짐에 따라 차량이 빔 경계에 머무는 시간이 늘어나기 때문이다.
이러한 트레이드오프를 정량화하기 위해 제안된 Beam Design Efficiency (BDE) 함수는
BDE = α·DataRate – β·Outage
이며, α와 β는 각각 최대 데이터율과 최소 정지 시간을 1과 0에 매핑하도록 선형 방정식(17,18)을 풀어 결정한다. BDE를 N_b와 겹침 비율에 대해 계산한 결과, σ²_v = (0.04·v)²인 경우 N_b가 41 이하일 때는 동일 커버리지가 BDE가 높아 우수하지만, N_b가 42~43을 초과하면 동일 빔폭 설계가 더 높은 BDE를 보여 효율적이다.
핵심 인사이트는 빔 수와 겹침 비율을 상황에 맞게 조정해야 한다는 점이다. 차량 속도 추정 오차가 작고 빔 수가 제한적일 때는 넓은 커버리지를 제공하는 동일 커버리지 설계가 데이터율을 크게 끌어올린다. 반면, 높은 정확도의 속도 추정이 어려워 오차가 커지거나 빔 수가 많아지는 경우, 빔 폭을 일정하게 유지하고 겹침을 최소화하는 동일 빔폭 설계가 정지 시간을 억제해 전체 효율을 높인다. 또한, BDE 지표는 설계자가 α, β를 서비스 요구(예: 고속 데이터 전송 vs. 낮은 지연)와 환경 조건(예: 차량 밀도, 속도 변동성)에 맞게 가중치를 조정해 최적 설계를 선택하도록 돕는다.
댓글 및 학술 토론
Loading comments...
의견 남기기