위치 프라이버시, 지오인디스팅어빌리티는 과연 최선인가
초록
본 논문은 기존 연구가 지나치게 지오인디스팅어빌리티(GeoInd)를 그대로 적용하면서 그 수치적 의미를 간과한 점을 지적한다. 저자는 GeoInd를 “공격자 오류 확률”이라는 형태로 재정의하고, 대표적인 메커니즘(평면 라플라스, 라플라스‑리매핑)과 가우시안·원형 잡음 방식을 비교한다. 실험 결과, 동일한 프라이버시 수준을 얻기 위해서는 GeoInd 기반 메커니즘이 평균 손실 및 95% 손실 측면에서 훨씬 큰 노이즈를 필요로 하며, 실제 서비스 품질을 크게 저하시킨다. 따라서 GeoInd가 모든 상황에서 최적의 선택은 아니라는 결론을 제시한다.
상세 분석
논문은 먼저 GeoInd의 정의를 기존의 “멀티플리케이티브 거리” 형태에서 “결정 공격자(decision adversary)의 최소 오류 확률” 형태로 변환한다. 이 변환은 식 (5) p*e = 1/(1+e^{ε·d(x,x′)}) 로, ε와 두 위치 사이 거리 d에 따라 공격자의 성공 확률이 명시적으로 계산될 수 있음을 보여준다. 이를 통해 ε = log 2, r = 200 m와 같은 전형적인 파라미터가 실제로는 공격자가 73 %의 확률로 올바른 위치를 추정할 수 있음을 드러낸다. 즉, “높은 인디스팅어빌리티”라는 직관이 실제 오류 확률 관점에서는 그리 설득력 없음을 강조한다.
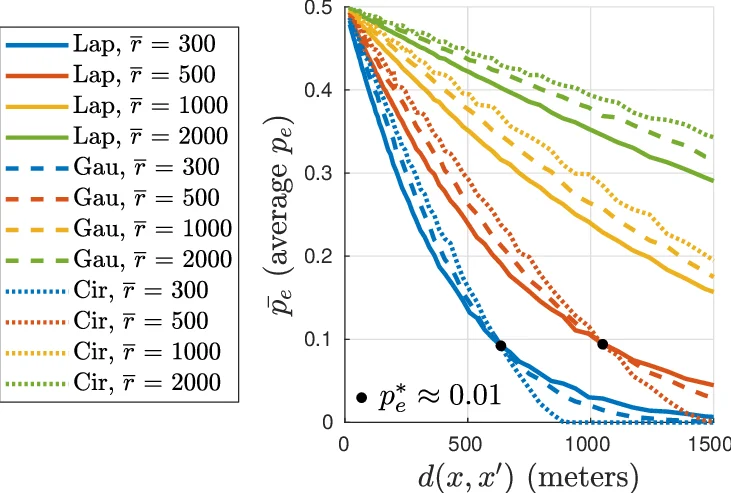
다음으로 저자는 두 가지 GeoInd 기반 메커니즘을 실험한다. 첫 번째는 평면 라플라스 메커니즘으로, 평균 손실 r = 2/ε이며 95 % 손실 r₉₅는 Lambert W 함수를 이용해 계산된다. 실험 결과, pe = 0.4(즉, 공격자 성공 확률 60 %) 수준을 달성하려면 r ≈ 5·r가 필요하고, 이는 실제 서비스에서 허용하기 어려운 1 km 수준의 평균 오차를 초래한다. 두 번째는 라플라스‑리매핑 메커니즘으로, 동일한 프라이버시 목표에 대해 평균 손실을 약 40 % 정도 줄일 수 있지만 r₉₅는 여전히 r*의 10배 이상이다. 즉, 평균 손실 감소가 있더라도 최악 상황에서의 오차는 크게 감소하지 않는다.
또한, 가우시안 및 균일 원형 잡음 메커니즘을 동일한 ε 조건 하에 비교한다. 평균 오류 확률(p_e) 측면에서 두 메커니즘은 라플라스보다 더 높은 오류를 제공하지만, 이는 ε가 작아 실제 프라이버시가 거의 보장되지 않을 때만 나타난다. 즉, “합리적인 프라이버시 수준”에서는 GeoInd 기반 메커니즘이 오히려 평균 오류가 낮아 공격자에게 유리해진다.
결론적으로, 논문은 GeoInd가 제공하는 최소 오류 보장은 실제 서비스 요구와는 괴리될 수 있음을 입증한다. 프라이버시 파라미터 ε를 선택할 때는 단순히 “log 2”와 같은 전통적 값에 의존하기보다, 목표 서비스의 허용 오차와 공격자 모델을 정량적으로 고려해야 한다는 점을 강조한다.
댓글 및 학술 토론
Loading comments...
의견 남기기