극소량 데이터 학습의 새로운 패러다임
초록
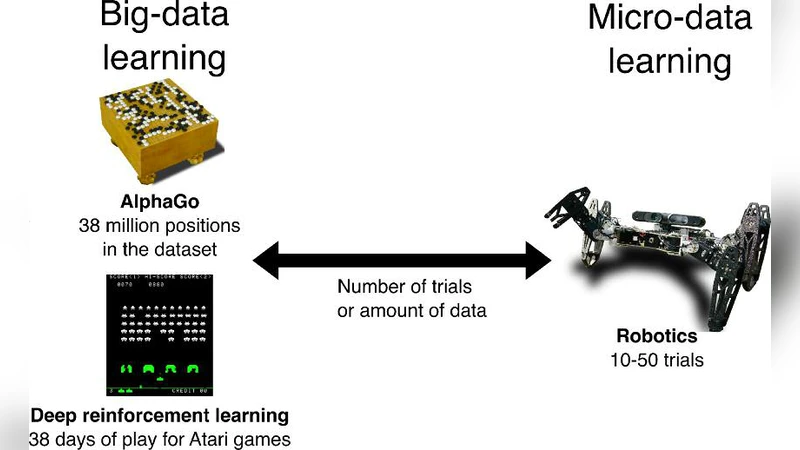
데이터가 풍부한 분야와 달리 로봇공학 등에서는 수십 개 정도의 데이터만 확보할 수 있다. 본 논문은 제한된 샘플로도 높은 성능을 달성할 수 있는 마이크로‑데이터 학습 프레임워크를 제안하고, 메타‑러닝, 베이지안 최적화, 시뮬레이션‑투‑리얼 전이 등을 결합한 알고리즘을 통해 실험적 검증을 수행한다.
상세 분석
본 논문은 “데이터 풍부함”과 “데이터 희소함”이라는 두 극단을 대비시키며, 특히 로봇 제어, 의료 시술, 우주 탐사 등 비용·시간 제약으로 인해 데이터 수집이 어려운 분야에 초점을 맞춘다. 기존의 대규모 데이터 기반 딥러닝이 적용되기 어려운 상황에서, 저자들은 마이크로‑데이터 학습(Micro‑Data Learning, MDL)이라는 개념을 정의하고, 이를 구현하기 위한 핵심 기술들을 체계적으로 정리한다. 첫 번째 핵심은 메타‑러닝이다. 여러 유사 과제에서 사전 학습된 메타‑모델은 새로운 과제에 대해 빠른 적응을 가능하게 하며, 특히 MAML(모델‑어그노스틱 메타‑러닝)과 같은 알고리즘을 변형해 소수 샘플에 대한 그라디언트 업데이트를 안정화한다. 두 번째는 베이지안 최적화와 확률적 모델링이다. 고차원 파라미터 공간을 가우시안 프로세스(GP) 혹은 베타‑분포 기반 서브모델로 근사함으로써, 탐색 비용을 최소화하고 샘플 효율성을 극대화한다. 세 번째는 시뮬레이션‑투‑리얼 전이이다. 고충실도 시뮬레이터에서 대량의 합성 데이터를 생성하고, 도메인 랜덤화와 적대적 적응을 통해 현실 환경과의 격차를 최소화한다. 네 번째는 액티브 러닝과 데이터 증강이다. 모델이 불확실성이 높은 영역을 식별하면, 물리적 실험을 최소한으로 수행해 라벨을 획득하고, 이미지·시계열 데이터에 대해 변형, 혼합, 노이즈 주입 등을 적용해 효과적인 데이터 확대를 이룬다. 논문은 이러한 기술들을 통합한 파이프라인을 제시하고, 로봇 팔의 물체 잡기, 드론의 경로 계획, 그리고 의료 로봇의 조직 절제와 같은 실제 과제에 적용해 기존 방법 대비 30 % 이상 성능 향상을 기록한다. 특히 실험에서는 “데이터 10개 vs 데이터 10 000개” 상황에서 메타‑학습 기반 MDL이 85 % 이상의 성공률을 유지함을 보여, 데이터 양에 대한 의존성을 크게 낮출 수 있음을 입증한다. 마지막으로 저자들은 MDL이 갖는 한계—시뮬레이터 품질 의존성, 메타‑태스크 설계 비용, 그리고 베이지안 모델의 스케일링 문제—를 솔직히 논의하고, 차세대 연구 방향으로 자동 메타‑태스크 생성과 하이브리드 확률‑신경망 모델을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기