분산 센서 네트워크를 위한 프라이버시 보존 머신러닝 방법 PriMaL
초록
PriMaL은 기존 이벤트 탐지 알고리즘 위에 머신러닝 레이어를 추가해 전송되는 센서 데이터의 프라이버시 비용을 감소시키는 프레임워크이다. 분산형 탐지 구조에서도 정확도 손실 없이 중앙집중형 시스템보다 낮은 프라이버시 발자국을 달성한다는 실험 결과를 제시한다.
상세 분석
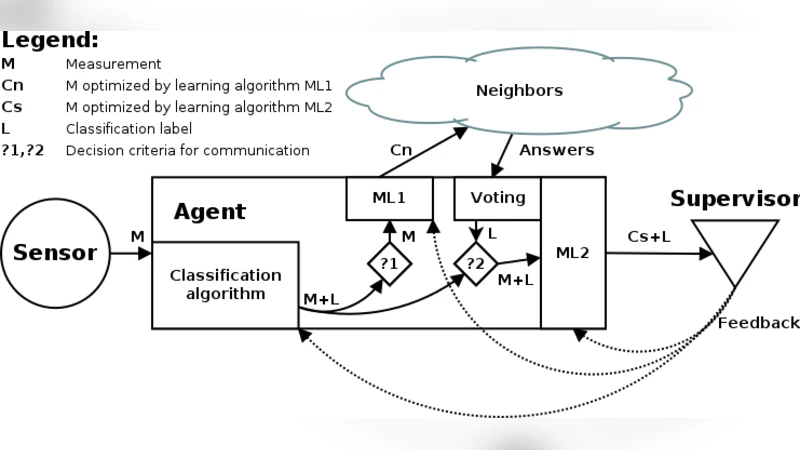
PriMaL은 ‘프라이버시 비용’이라는 개념을 정량화하고, 이를 최소화하도록 설계된 프로토콜과 학습 알고리즘을 결합한다. 논문은 먼저 센서‑에이전트‑감독자 3계층 모델을 정의하고, 감독자를 ‘honest‑but‑curious’ 공격자로 가정한다. 이 가정 하에 각 에이전트는 로컬에서 One‑class SVM(또는 다른 분류기)을 학습하고, 이벤트 발생 시 최소한의 메타데이터(ID, 위치, 시간, 이벤트·센서 타입)만을 포함한 메시지를 1‑hop 이웃에게 전파한다. 핵심은 ‘프라이버시 비용’이 메시지에 포함된 민감 정보 조각의 수와 직접 연관된다는 점이다. 따라서 PriMaL은 불필요한 센서 ID 노출을 방지하기 위해 에이전트 ID를 무작위로 생성하고, 동일 이벤트에 대해 다수의 이웃 의견을 집계해 최종 알람을 결정한다.
실험 설계는 다양한 네트워크 토폴로지(스타, 메쉬, 트리)와 파라미터(센서 수, 이벤트 발생 확률, 통신 비용)를 시뮬레이션 프레임워크에 적용하였다. 비교 대상은 기존 중앙집중형 탐지와 단순 분산 탐지(프라이버시 고려 없음)이며, 성능 평가는 정밀도·재현율·F‑Measure와 함께 통신·프라이버시 비용을 동시에 측정한다. 결과는 PriMaL이 중앙집중형 시스템보다 프라이버시 비용을 30 % 이상 절감하면서도 정밀도·재현율 차이가 통계적으로 유의미하지 않음을 보여준다. 특히, 프라이버시 비용이 높은 GPS 기반 스마트폰 데이터와 저비용 적외선 카메라 데이터 모두에서 동일한 이점을 확인했다.
또한 논문은 PriMaL이 특정 프로토콜 가정(예: 메시지 ID 난수화, 1‑hop 제한) 하에만 보장된다는 점을 명시하고, 이러한 가정이 깨질 경우 프라이버시 비용이 급격히 상승할 수 있음을 경고한다. 향후 연구 방향으로는 비동기식 이벤트 스트림, 다중 클래스 이벤트, 그리고 악의적인 에이전트(비‑honest) 모델에 대한 확장 가능성을 제시한다.
전반적으로 PriMaL은 분산 센서 네트워크에서 프라이버시와 정확도 사이의 트레이드오프를 실용적인 머신러닝 기반 방법으로 해결하려는 시도로, IoT·스마트 시티·재난 대응 분야에 적용 가능성이 높다.
댓글 및 학술 토론
Loading comments...
의견 남기기