시간 제약 논리 기반 분산 협동 조작 제어
초록
본 논문은 N개의 로봇이 물체를 공동으로 조작하면서 각 로봇이 서로 통신하거나 접촉력 정보를 이용하지 않고도 미터리 인터벌 템포럴 로직(MITL)으로 정의된 시간 제약 목표를 만족하도록 하는 분산 모델‑프리 제어 방식을 제안한다. 제어 설계는 물체‑에이전트 시스템을 유한 전이 시스템으로 추상화하고, 자동화 이론을 이용해 MITL 사양을 만족하는 경로를 생성한다. 또한 로봇 간의 힘·토크 차이를 보상하기 위해 부하 공유 계수를 도입하였다. 시뮬레이션을 통해 제안 기법의 유효성을 검증하였다.
상세 분석
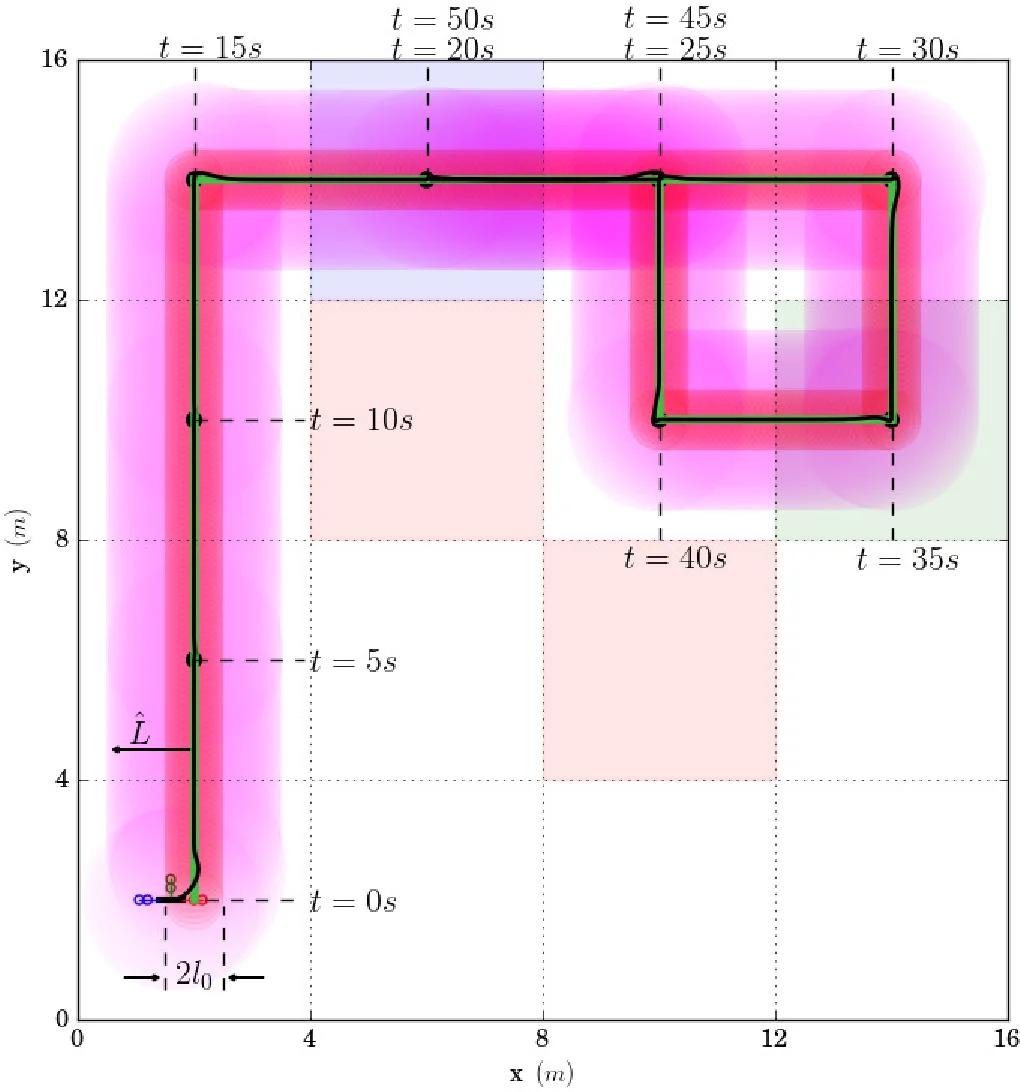
이 논문은 협동 조작 문제를 기존의 단순 궤적 추적에서 한 단계 끌어올려, 시간 구간이 명시된 복합 목표를 만족하도록 설계된 제어 체계를 제시한다. 핵심 기여는 네 가지로 요약할 수 있다. 첫째, 각 로봇이 자신의 관절 상태와 사전 정의된 기하학적 파라미터만을 이용해 물체와 자신의 위치·속도를 계산하고, 접촉력·토크 센서나 상호 통신 없이도 물체의 전역 궤적을 추적하도록 하는 모델‑프리 분산 제어 프로토콜을 설계하였다. 이는 전통적인 임피던스·포스 제어가 요구하는 고정밀 센서와 통신 인프라를 제거함으로써 시스템 복잡도와 비용을 크게 낮춘다. 둘째, 제어 설계에 ‘프리시전드 트랜시언트·스테디‑스테이트 퍼포먼스(PT‑SSP)’ 기법을 적용해, 원하는 수렴 속도와 오버슈트를 사전에 지정할 수 있게 함으로써 시간 구간 제약을 만족시키는 기반을 제공한다. 셋째, 물체‑에이전트 복합 시스템의 연속 역학을 유한 전이 시스템(Finite Transition System, FTS)으로 추상화하고, 각 셀(region) 간 전이 시간을 상한으로 정의함으로써 MITL 사양을 만족하는 경로 탐색을 자동화 이론(automata‑based synthesis)과 결합하였다. 이때 전이 조건은 “전체 시스템이 출발 셀과 도착 셀 사이에 머무는 동안 다른 셀을 침범하지 않는다”는 물리적 제약을 포함한다. 넷째, 로봇마다 서로 다른 구동 능력을 반영하기 위해 부하 공유 계수(load‑sharing coefficients)를 도입, 각 로봇이 담당하는 힘·토크 비율을 조정함으로써 과부하를 방지하고 협동 효율을 극대화한다. 제안된 프레임워크는 전제 조건으로 물체와 로봇이 강체 접촉을 유지하고, 기구학·동역학이 연속적이며 특이점이 없다는 가정을 둔다. 이론적 분석에서는 제어 입력이 유계이며, 전체 시스템의 상태가 정의된 영역 내에서 존재함을 보장하는 최대 해 존재 정리를 이용해 안정성을 증명한다. 마지막으로 시뮬레이션 결과는 복잡한 MITL 사양(예: “시간
댓글 및 학술 토론
Loading comments...
의견 남기기