도시 배수 시뮬레이터를 위한 데이터‑기반·기계론적 에뮬레이터 성능 비교
** 본 논문은 도시 배수 시스템의 비선형 수리학 시뮬레이터를 빠르게 대체할 수 있는 두 종류의 에뮬레이터—기계론적 지식을 활용한 Gaussian Process 기반 메커니즘 에뮬레이터(MEM)와 순수 데이터 기반 행렬 분해(SVD·NMF) 에뮬레이터—의 예측 정확도와 일반화 능력을 비교한다. 실험 결과, 대부분의 실제 및 학술 사례에서 데이터‑기반 에뮬레이터가 더 높은 정확도와 효율성을 보였으며, MEM은 시간 외삽 및 데이터가 희소·불균…
저자: Juan Pablo Carbajal, Jo~ao Paulo Leit~ao, Carlo Albert
**
이 논문은 도시 배수 시스템의 비선형 수리학 시뮬레이터를 실시간 제어와 홍수 예측에 활용하기 위해, 기존의 고성능 시뮬레이터가 갖는 계산 비용을 크게 낮출 수 있는 두 종류의 에뮬레이터—기계론적 지식을 활용한 Gaussian Process 기반 메커니즘 에뮬레이터(MEM)와 순수 데이터 기반 행렬 분해(SVD·NMF) 에뮬레이터—의 설계 원리와 성능을 체계적으로 비교한다.
**연구 배경**에서는 모델 기반 감도 분석, 파라미터 식별, 최적 제어 등에서 수천~수만 번의 시뮬레이션이 요구되며, 전통적인 EPANET·SWMM 같은 물리 기반 시뮬레이터는 실행 시간이 수초에서 수분에 이르러 실시간 응용에 부적합함을 지적한다. 이를 해결하기 위해 에뮬레이터(메타모델, 축소 차원 모델) 개념을 도입하고, 두 접근법을 구분한다.
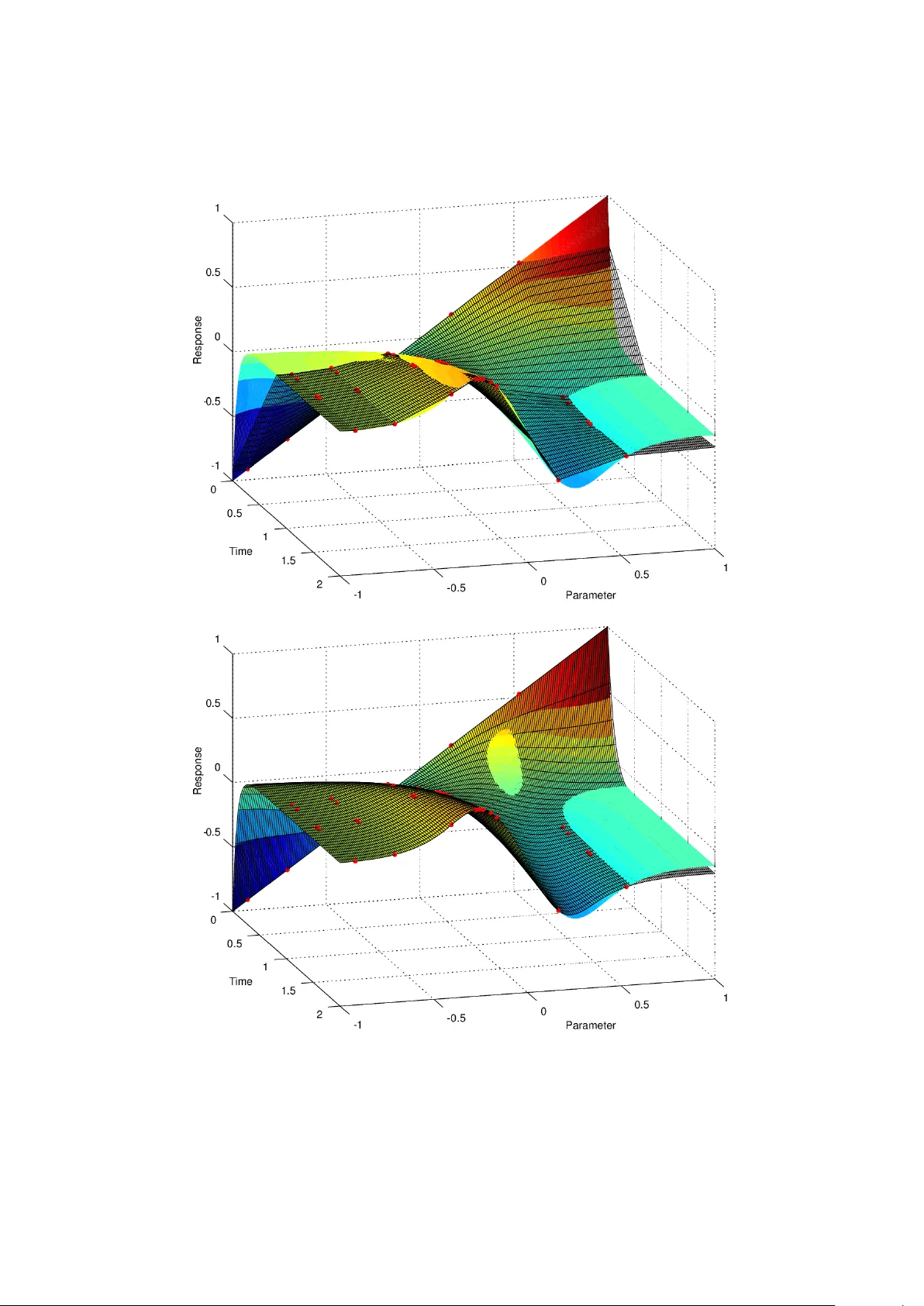
**데이터‑기반 에뮬레이터**는 다음 절차로 구현된다. 첫째, 시뮬레이터가 생성한 N개의 시간‑파라미터 쌍(y_i(t,γ_i))를 행렬 Y∈ℝ^{N×n} 로 정리한다. 둘째, SVD 혹은 NMF를 적용해 Y≈ΦB 로 분해한다. 여기서 Φ∈ℝ^{N×q}는 시간적 기저 함수 φ_i(t)를, B∈ℝ^{q×n}는 각 시뮬레이션에 대한 계수 β_i(γ) 를 담는다. 셋째, 각 파라미터 γ에 대한 계수 벡터 B(γ)를 Gaussian Process 회귀로 학습한다. 마지막으로 새로운 γ에 대해 B̂(γ) 를 예측하고, ŷ(t,γ)=∑_{i=1}^q β_i(γ)φ_i(t) 로 재구성한다. 이 방법은 (a) 데이터가 시스템의 주요 동적 모드를 충분히 포착하고, (b) 새로운 파라미터에 대한 계수 변화를 부드럽게 매핑할 수 있다는 전제 하에 작동한다. SVD는 정교한 주성분을 제공하지만 부호가 자유롭고 물리적 해석이 어려울 수 있다. 반면 NMF는 비음수 제약을 통해 유량·수위와 같은 물리량을 직관적으로 해석할 수 있다.
**기계론적 에뮬레이터(MEM)**는 시뮬레이터가 근본적으로 풀고 있는 선형(또는 선형화된) 확률 미분 방정식(LTI SODE)을 사전 모델로 채택한다. 상태 변수 s(t)∈ℝ^M 은 d s/dt = A(γ)s(t)+u(t,γ)+ξ(t) 로 기술되며, 여기서 A는 시스템 행렬, u는 외부 강우·게이트 제어 입력, ξ는 백색 가우시안 노이즈이다. 이 SODE의 해는 평균 함수 m(t)=E
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기