최소 군집 지능을 활용한 최적 공간 분할 기법
초록
본 논문은 전역 경계 정보를 필요로 하는 전통적 CVT 방식의 한계를 극복하고자, 최근접 이웃과 차근접 이웃을 이용한 두 가지 단순 분할 알고리즘(RAO, ONNRAO)을 제안한다. 알고리즘은 경계와 장애물, 가중치 영역을 자연스럽게 처리하며, 고차원에서도 구현이 용이하지만 최적 배치(헥사곤)와는 차이가 있다. 실험을 통해 성능·분포·확장성을 평가하고, 파티클 스웜 최적화 초기화에의 적용 가능성을 제시한다.
상세 분석
이 논문은 공간 분할 문제를 CVT(중심볼로노이 테셀레이션)와 비교하면서, 전역적인 경계·가중치·고차원 확장에 대한 CVT의 구현 복잡성을 지적한다. 제안된 두 알고리즘은 ‘Repulsive Agent Optimizer (RAO)’와 ‘Orthogonal Nearest‑Neighbor Repulsive Agent Optimizer (ONNRAO)’로 명명되며, 기본 아이디어는 입자 간 L1 거리 평균값을 기준으로 가까운 이웃 사이에 반발력을 적용하는 것이다. RAO는 단순히 가장 가까운 이웃(NN)과의 거리를 기준으로 위반 시 거리 차에 비례하는 벡터를 부여해 입자를 멀리 이동시킨다. 경계 조건은 전기학의 이미지 전하 개념을 차용해, 입자가 경계에 근접하면 경계 반대쪽에 가상의 이미지 입자를 만들어 동일한 반발력을 적용함으로써 경계 내에 머물게 한다.
ONNRAO는 여기서 한 단계 더 나아가 차근접 이웃(NN+1)을 고려한다. 두 이웃을 연결한 선분에 대해 현재 입자와의 수직 거리를 계산하고, 이 수직 거리가 전체 평균 정규화 거리보다 작을 경우 선분으로부터 멀어지도록 추가적인 정규화된 변위를 부여한다. 이는 입자들이 일직선 상에 과도히 몰리는 ‘공선(collinear) 클러스터링’ 현상을 억제하고, 보다 균일한 2‑D 배치를 유도한다.
알고리즘 수렴 기준은 CVT와 유사하게 이전·현재 위치 차이의 제곱합이 사전 정의된 임계값 이하가 되면 종료한다. 그러나 실제 실험에서는 카오스·마코프 효과로 인해 수렴이 느리거나 진동이 발생할 수 있기에 최대 반복 횟수를 보조 조건으로 둔다.
실험에서는 2‑D 정사각형 영역에 100개의 입자를 배치해 Gersho 정리를 검증하였다. CVT는 기대대로 헥사곤 형태의 듀얼을 생성했으나, RAO는 주로 사각형, ONNRAO는 다양한 비효율적 다각형을 만들었다. 분산 분석 결과, RAO가 가장 큰 분산을 보였고, ONNRAO는 중간, CVT가 가장 낮은 분산을 나타냈다. 추가적인 확률 밀도 함수(PDF)와 누적 분포 함수(CDF) 분석에서는 ONNRAO가 비정수(10,13) 개수의 입자에 대해 가장 넓은 탐색 자유도를 보였으며, 정수 개수(25)에서는 CVT와 비슷한 균일성을 보였다.
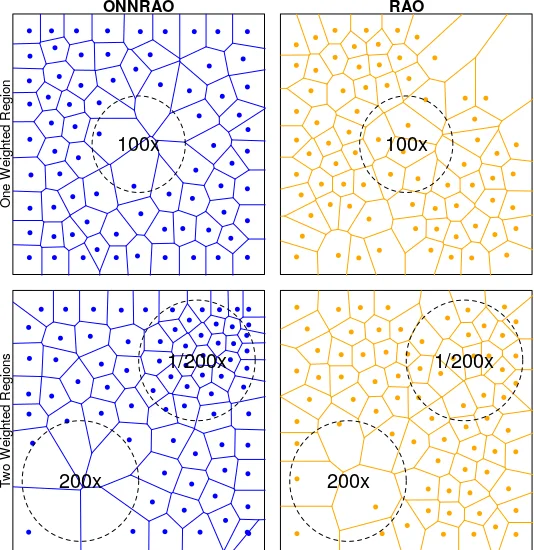
가중치 영역 적용 실험에서는 ONNRAO가 가중치 비율(100배, 200배, 1/200배) 변화에 따라 입자 밀도를 적절히 조절했지만, RAO는 초기 단계에서 가중치에 의해 발생하는 ‘불균형 이동’ 문제로 인해 많은 빈 공간이 남는 현상을 보였다. 이는 RAO가 평균 거리 기반 반발력을 사용하면서 가중치가 큰 영역에서 과도한 이동을 강제받아 전체 시스템의 평균 거리 계산이 왜곡되기 때문이다. 가중치를 수렴 후에 적용하면 문제를 완화할 수 있으나, 이는 추가적인 구현 복잡성을 야기한다.
장애물 처리 실험에서는 이미지 전하 방식을 이용해 정중앙의 정사각형 장애물과 비대칭 직사각형 장애물을 회피하도록 설계하였다. 두 알고리즘 모두 장애물을 성공적으로 회피했으나, ONNRAO가 더 고르게 입자를 배치했으며, RAO는 특히 입자 수가 10 이하일 때 가용 영역 손실을 보완하지 못하는 한계가 있었다.
고차원(2~5 차원) 확장성 테스트에서는 N‑차원 단순체(볼록 껍질) 계산이 필요 없는 RAO·ONNRAO의 장점이 부각된다. PCA를 이용해 각 차원별 분산 비율을 분석했을 때, 최적 분할이라면 각 주성분이 1/N의 분산을 가져야 한다는 가정 하에, ONNRAO가 가장 근접한 값을 보였고, RAO는 무작위 배치와 거의 차이가 없었다. 이는 차원 증가에 따라 입자 간 거리 계산만으로는 충분히 균일한 배치를 만들기 어렵다는 점을 시사한다.
성능 측면에서는 반복 횟수와 입자 수, 차원 수에 따라 크게 달라진다. 예를 들어 75개의 입자를 1×1 정사각형에 배치했을 때 RAO는 약 8,500회, ONNRAO는 약 600회만에 수렴했으며, 이는 ONNRAO가 추가적인 정규화·정규 직교 반발을 통해 더 빠른 수렴을 달성함을 의미한다. 그러나 전체 연산 복잡도는 O(N²) 수준으로, 입자 수가 급증하면 GPU 가속이나 근사 이웃 탐색 구조(k‑d tree 등)의 도입이 필요할 것이다.
전반적으로 이 논문은 CVT의 전역적 복잡성을 회피하면서도 ‘무지(uninformed)’ 센서 네트워크나 분산 로봇 시스템에 적용 가능한 경량 알고리즘을 제시한다. 최적성(헥사곤)보다는 구현 용이성·확장성·가중치·장애물 처리 능력에 초점을 맞추었으며, 특히 ONNRAO는 실용적인 초기화 전략으로 파티클 스웜 최적화(PSO)에서 다중모드 함수에 대한 탐색 효율을 향상시킬 가능성을 보여준다. 다만, 수렴 보장·반발력 파라미터 튜닝·고차원에서의 균일성 확보 등은 향후 연구 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기