모빌리티가 무선 라우팅 프로토콜 성능에 미치는 영향 분석
본 논문은 AODV, DSR, DYMO(reactive)와 DSDV, FSR, OLSR(proactive) 6가지 라우팅 프로토콜을 다양한 이동성 모델(HWM, HRM, SCM, FCM)과 정지 시간(0~900 s) 조건에서 NS‑2 시뮬레이션을 통해 평가한다. 주요 평가지표는 스루풋, 종단‑대‑종단 지연, 정규화 라우팅 부하이며, 실험 결과를 기반으로 프로토콜별 성능 순위를 제시한다.
저자: N. Javaid, M. Yousaf, A. Ahmad
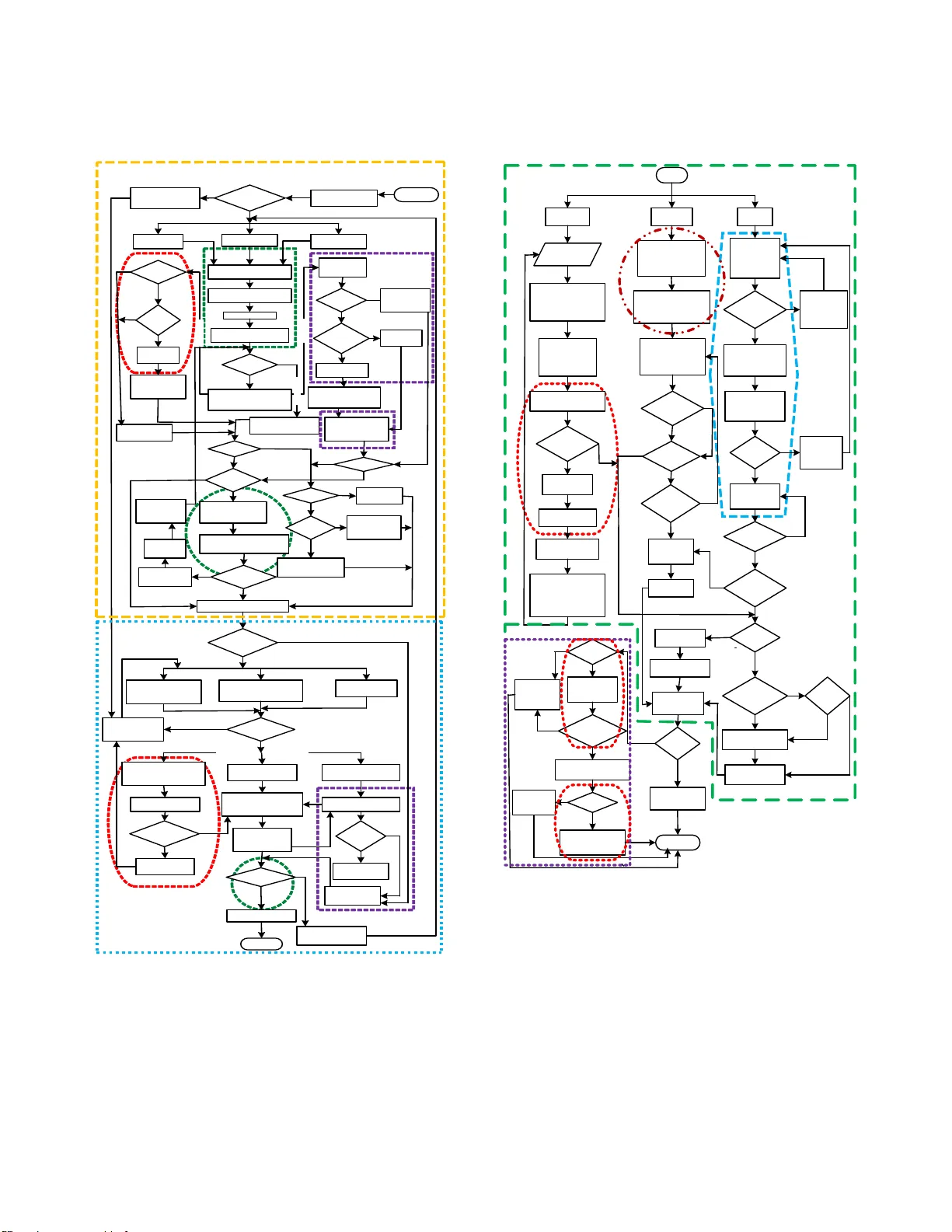
이 논문은 무선 멀티홉 네트워크에서 이동성(Mobility)이 라우팅 프로토콜 성능에 미치는 영향을 체계적으로 분석한다. 연구자는 AODV, DSR, DYMO라는 세 가지 Reactive 프로토콜과 DSDV, FSR, OLSR이라는 세 가지 Proactive 프로토콜을 선정하여, 각각의 라우팅 메커니즘, 라우트 디스커버리(RD)와 라우트 유지보수(RM) 절차, 그리고 이동성에 대한 대응 전략을 정리하였다.
시뮬레이션 환경은 NS‑2 기반이며, 50개의 노드가 1000 m × 1000 m 평면을 무작위 이동한다. 이동 모델은 인간 보행(HWM, 2 m/s), 인간 달리기(HRM, 8 m/s), 저속 차량(SCM, 15 m/s), 고속 차량(FCM, 30 m/s) 네 가지이며, 각 모델마다 정지 시간(pause time)을 0 s, 100 s, …, 900 s까지 10단계로 변동시켜 정지‑이동 비율을 조절한다. 트래픽은 20개의 CBR 흐름(패킷 크기 512 byte, 2 Mbps 채널)으로 설정하였다.
**Reactive 프로토콜 분석**
- **AODV**는 2‑hop 라우팅과 HELLO/LLR 메시지를 이용해 링크 상태를 주기적으로 확인하고, 라우트 테이블에 유효시간을 부여한다. 이는 고속 이동에서도 라우트 파괴를 빠르게 감지하고 재구축할 수 있게 한다.
- **DSR**는 소스 라우팅과 경로 캐시를 활용한다. 하나의 목적지에 대해 다중 경로를 저장하고, 프라미스큐(Passive Acknowledgment)와 프로미스큐 모드가 라우트 재구축을 최소화한다. 결과적으로 높은 이동성에서도 가장 높은 스루풋을 기록한다.
- **DYMO**는 AODV와 유사한 라우트 디스커버리 절차를 갖지만, 그라디언트 RREP을 사용하지 않아 경로 정보 전파가 제한적이다. 따라서 모든 이동성 시나리오에서 스루풋이 가장 낮았다.
시뮬레이션 결과, 고속·고이동성 상황(HRM, SCM, FCM)에서는 DSR이 가장 높은 스루풋을 보였으며, AODV가 그 뒤를 이었다. DYMO는 전반적으로 낮은 스루풋을 기록했다. 이는 DSR이 경로 캐시와 프라미스큐를 통해 라우트 재구축 비용을 크게 절감했기 때문이다.
**Proactive 프로토콜 분석**
- **DSDV**는 전·부분 덤프와 증분 업데이트를 결합해 라우팅 정보를 전파한다. 시퀀스 번호를 이용해 루프를 방지하고, 동일 시퀀스 번호를 가진 라우트는 안정화될 때까지 광고를 지연시켜 라우트 테이블의 정확성을 높인다. 결과적으로 모든 이동성 모델에서 가장 높은 스루풋을 달성한다.
- **FSR**는 Fish‑eye 라우팅 방식을 적용해 근거리와 원거리 정보를 서로 다른 주기로 전송한다(그레이디드‑프리퀀시). 이는 대규모 네트워크에서 라우팅 오버헤드를 감소시키지만, 낮은 이동성에서는 오래된 라우트를 삭제하는 메커니즘이 없어 스루풋이 감소한다. 또한 트래픽 부하가 높을수록 성능이 향상되는 특성을 보인다.
- **OLSR**는 MPR(Multi‑Point Relay) 선택을 통해 토폴로지 제어(TC) 메시지 전파를 최소화하고, Dijkstra 알고리즘으로 최단 경로를 계산한다. 그러나 고속 이동성에서는 MPR 기반 전파가 링크 파괴를 즉시 반영하지 못해 라우트 수렴이 늦어지고, 결과적으로 스루풋이 급격히 감소한다.
**종합 평가 및 트레이드오프**
- 전체 프로토콜을 스루풋 기준으로 순위 매기면 DSR > AODV > DSDV > DYMO > OLSR > FSR이다.
- Reactive 프로토콜은 데이터 전송 전 라우트를 미리 계산하지 않으므로, 이동성에 따른 라우트 파괴 시 재계산 비용이 발생하지만, 라우팅 오버헤드가 적어 고속 이동성에서 유리하다.
- Proactive 프로토콜은 라우팅 정보를 사전에 유지하므로 데이터 전송 지연이 적지만, 높은 이동성에서는 라우트 테이블 수렴이 늦어 스루풋이 감소한다.
- DSDV는 전·부분 덤프와 시퀀스 번호 기반 안정화 메커니즘 덕분에 전반적으로 높은 스루풋을 유지하지만, 대규모 네트워크에서는 업데이트 비용이 증가할 수 있다.
- FSR는 대규모 네트워크와 높은 트래픽 부하에서 효율적이지만, 낮은 이동성에서는 경로 정리 메커니즘 부재가 성능 저하 요인이다.
- OLSR은 MPR 기반 전파가 고속 이동성에 취약하며, MPR 선택과 TC 전파 주기를 최적화해야 한다.
**결론**
본 연구는 다양한 이동성 모델과 정지 시간을 고려한 포괄적인 시뮬레이션을 통해, 각 라우팅 프로토콜이 어떤 상황에서 강점을 보이고 어떤 트레이드오프를 겪는지를 명확히 제시한다. 프로토콜 선택 시 적용 환경(노드 속도, 정지 비율, 네트워크 규모, 트래픽 부하)을 종합적으로 고려해야 하며, 특히 고속 이동성에서는 DSR이나 AODV와 같은 Reactive 프로토콜이, 안정적인 저속 환경에서는 DSDV와 같은 Proactive 프로토콜이 적합하다는 실용적인 가이드를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기