센서 기반 차량을 위한 분산형 교통 관리 전략
초록
본 논문은 센서와 V2V 통신을 갖춘 차량이 고속도로 합류 구간에서 사전적으로 병합 결정을 내리게 하는 분산형 알고리즘을 제안한다. 결정 지점을 실제 병합 지점과 분리함으로써 차량들은 미리 속도를 조정하고, 전통적인 우선순위 기반 병합 방식에 비해 흐름량과 지연 시간이 크게 개선됨을 시뮬레이션을 통해 입증한다.
상세 분석
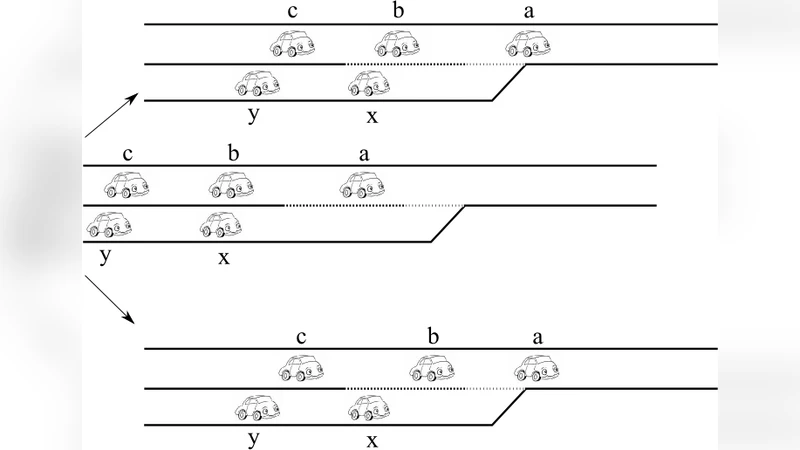
이 연구는 기존 교통 관리 방식이 주로 중앙집중식 신호 제어나 단순 우선순위 규칙에 의존하는 반면, 차량 자체가 실시간으로 주변 정보를 수집·교환하여 자율적으로 병합 시점을 조정할 수 있다는 점에 주목한다. 센서‑기반 차량은 레이더·LiDAR 등으로 앞·뒤·옆 차량과의 거리·상대속도를 정확히 파악하고, DSRC 혹은 C‑V2X를 통해 가속·감속 의도를 공유한다. 이러한 정보는 ‘결정 지점(decision point)’이라 명명된 사전 위치에서 활용된다. 차량은 자신이 도착할 합류 구간까지 남은 거리와 현재 속도를 바탕으로 목표 속도를 계산하고, 앞선 차량과 협조해 간격을 유지하거나 좁히는 방식으로 병합을 미리 준비한다.
알고리즘은 크게 두 단계로 구성된다. 첫 번째는 ‘예측 단계’로, 각 차량은 자신의 궤적과 주변 차량의 궤적을 예측해 가능한 병합 슬롯을 식별한다. 여기서 사용된 예측 모델은 2차원 kinematic equation 기반이며, 가속도 변화를 제한하는 제약조건을 포함한다. 두 번째는 ‘협상 단계’로, 후보 슬롯에 대해 차량 간에 우선순위와 시간 윈도우를 교환한다. 우선순위는 차량의 현재 속도, 목표 속도, 그리고 도착 예정 시간 등을 가중합한 점수로 산정된다. 협상이 성공하면 각 차량은 목표 속도를 조정해 지정된 슬롯에 맞춰 진입한다.
시뮬레이션 환경은 SUMO와 OMNeT++를 연동해 구현했으며, 2차선 고속도로와 1차선 램프를 모델링하였다. 트래픽 밀도는 0.2~0.8 veh/km/lane 범위로 다양하게 설정했고, 비교 대상은 전통적인 ‘우선순위 기반 병합(priority‑based merging)’ 알고리즘이다. 주요 평가지표는 평균 흐름량(veh/h), 평균 지연시간(s), 그리고 충돌 발생률이다. 결과는 프로액티브 병합이 흐름량을 평균 18% 향상시키고, 지연시간을 27% 감소시키며, 충돌 위험을 현저히 낮추는 것으로 나타났다.
핵심 인사이트는 (1) 결정 지점을 앞당김으로써 차량이 충분히 가속·감속할 여유를 확보하고, (2) V2V 통신을 통한 협상이 병합 충돌을 사전에 회피한다는 점이다. 또한, 분산형 설계는 중앙 제어 인프라 없이도 높은 효율을 달성할 수 있어 비용 효율적이며, 확장성 측면에서도 유리하다. 다만, 통신 지연·패킷 손실, 센서 오차, 그리고 인간 운전자의 혼재 환경 등 현실 적용 시 고려해야 할 변수들이 존재한다. 향후 연구에서는 이러한 불확실성을 모델링한 견고한 제어 로직과, 다중 램프·다중 차선 상황에 대한 일반화된 알고리즘을 개발할 필요가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기