생체 로봇 네트워크를 이용한 기하학 학습과 위상 추론 수렴 분석
본 논문은 최소 센싱과 좌표 정보 없이 움직이는 사이보그 곤충(바이오봇)들의 지역적 만남 데이터를 활용해 환경의 기하학적 구조와 위상적 특성을 추정하는 프레임워크를 제시한다. encounter graph 상에서 정의한 거리 측정값을 통해 Isomap 기반 점군을 복원하고, 지속적 동형론(persistent homology)으로 장애물 존재 여부를 판별한다. 또한 제안한 거리 척도가 실제 지오데식 거리로 수렴함을 증명하고, 위상 영속도(bottl…
저자: Alireza Dirafzoon, Alper Bozkurt, Edgar Lobaton
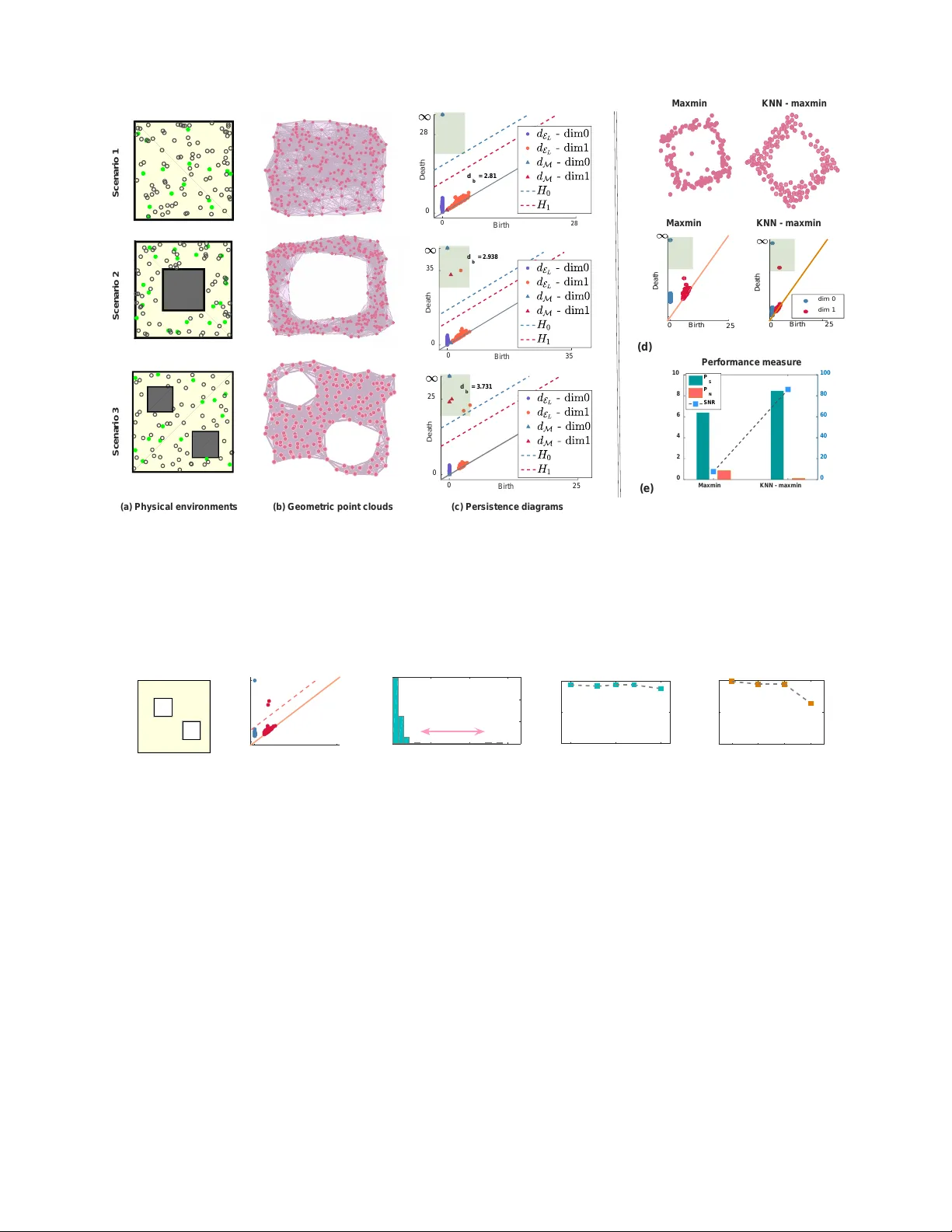
본 논문은 제한된 센싱과 좌표 정보만을 갖는 사이보그 곤충(바이오봇) 네트워크를 활용해 미지의 2차원 환경을 기하학적·위상적으로 매핑하는 새로운 프레임워크를 제시한다. 연구는 크게 네 부분으로 구성된다.
첫 번째는 바이오봇의 이동 모델 정의이다. 자연 이동(NM)은 상관 랜덤 워크(CRW)와 벽 따라 이동(WF)으로 구성되며, 로봇은 일정 확률로 정지(S) 상태도 갖는다. 이러한 확률적 움직임은 기존 곤충 행동 연구
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기