촉각 데이터의 비지도 사전처리와 잠재 공간 활용
본 논문은 촉각 센서에서 얻은 고차원·비선형 데이터를 라벨 없이 학습 가능한 변분 오토인코더(VAE)로 압축하여, 압축된 잠재 표현이 물리량 예측 및 간단한 제어에 기존 원시 데이터보다 우수함을 실험적으로 입증한다. BioTac과 iCub 두 종류 센서를 이용해 힘, 표면 각도, 경도, 곡률 등 다양한 자극을 기록하고, 선형 회귀·결정 트리·다층 퍼셉트론 등으로 비교 분석한다. 결과는 VAE 기반 전처리가 데이터의 비선형·희소성을 해소하고, 소…
저자: Maximilian Karl, Justin Bayer, Patrick van der Smagt
본 논문은 촉각 센서가 제공하는 고차원·비선형 데이터를 라벨 없이 압축하고, 압축된 잠재 표현을 통해 물리량 예측 및 제어에 활용하는 방법을 제시한다. 연구 동기는 촉각 센서가 변형 가능하고 센서 간 상관관계가 높아 원시 데이터를 직접 활용하기 어렵다는 점에 있다. 기존에는 라벨이 포함된 캘리브레이션이 필요했지만, 이는 시간·노력 소모가 크고, 라벨 선택에 따라 중요한 특징이 누락될 위험이 있다.
저자들은 이러한 문제를 해결하기 위해 비지도 학습, 특히 변분 자동인코더(VAE)를 적용한다. VAE는 인코더 q(z|x)와 디코더 p(x|z)로 구성되며, SGVB(Stochastic Gradient Variational Bayes) 기법을 이용해 확률적 잠재 변수 z를 학습한다. 잠재 변수는 평균 0, 단위 공분산을 갖는 연속형 가우시안으로 가정하고, KL‑다이버전스와 재구성 손실을 동시에 최소화한다. 인코더와 디코더는 각각 2개의 은닉층(512 유닛)으로 구성되며, BioTac 데이터에는 sigmoid, iCub 데이터에는 ReLU 활성함수를 사용한다. 최적화는 BioTac에 rmsprop(learning rate 0.001), iCub에 adadelta(learning rate 0.1)를 적용한다.
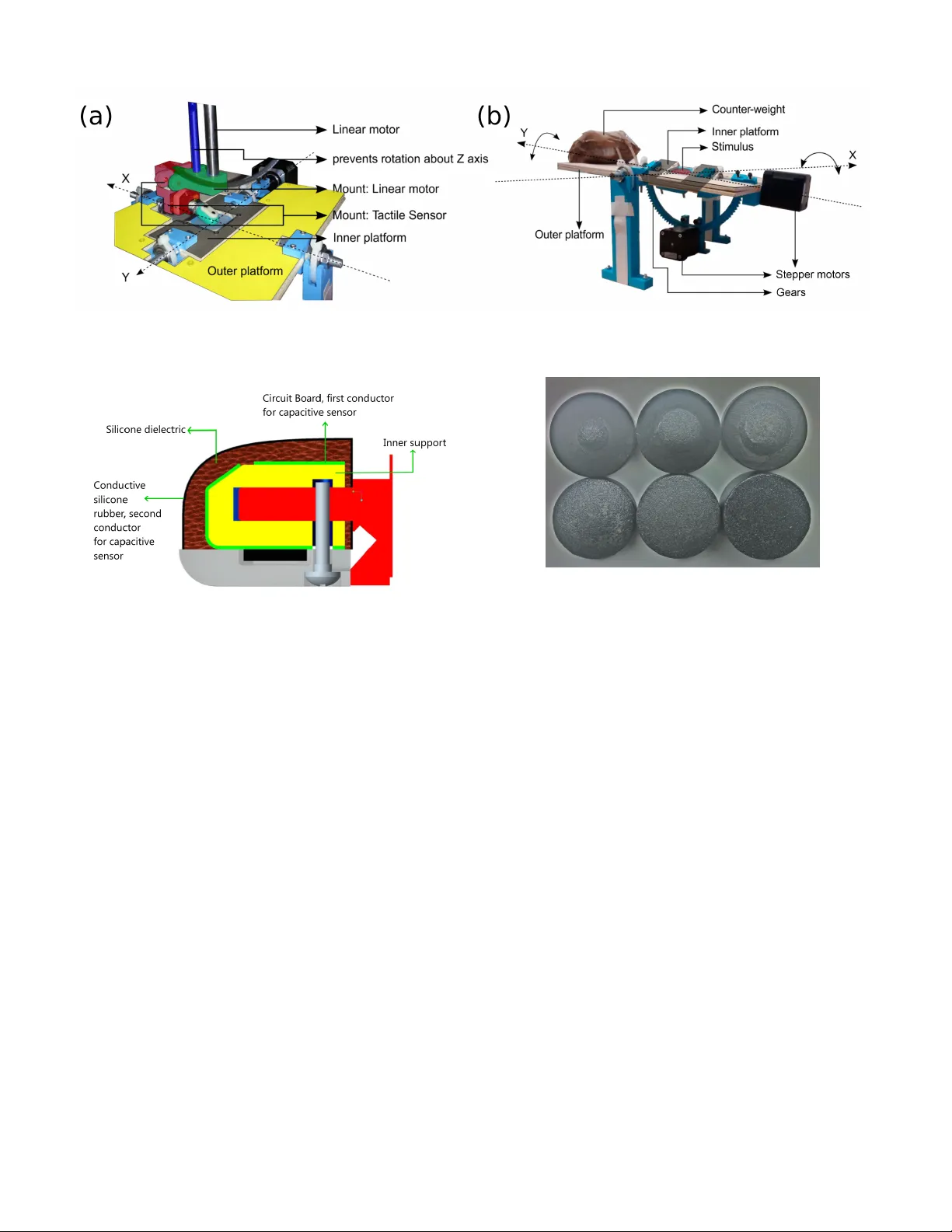
실험에 사용된 촉각 센서는 두 종류다. BioTac은 액체 전도도 기반의 부드러운 실리콘 막을 갖고 19개의 taxel을 제공한다. iCub은 정전용량 기반이며 12개의 taxel을 갖는다. 두 센서는 물리적 특성과 측정 원리가 달라 원시 데이터의 형태가 크게 다르다. 이를 보완하기 위해 저자들은 3‑DOF 로봇과 gimbal 플랫폼을 구축해 정밀하게 데이터를 수집했다. 데이터셋은 세 가지로 구성된다. (A) 표면 각도 데이터: roll ±19°, pitch ±3.6°, 힘 0–5 N를 적용해 각도와 힘의 관계를 기록. (B) Shore A 경도 데이터: 0–30 Shore A 범위의 실리콘 판을 사용해 다양한 경도와 각도 조합을 측정. (C) 곡률 데이터: 반경 5 mm~40 mm의 구형 물체에 접촉해 곡률 정보를 획득. 각 데이터셋은 힘, 각도, 경도 등 가능한 모든 조합을 포함한다.
학습된 VAE는 원시 데이터의 비선형·희소성을 잠재 공간에 선형·분리 가능한 형태로 변환한다. 이를 검증하기 위해 세 가지 회귀 모델(선형 회귀, 결정 트리 회귀, 다층 퍼셉트론)과 두 가지 분류 모델(선형 SVM, 다층 퍼셉트론)로 실험을 진행했다. 결과는 다음과 같다.
1. 회귀 성능: 모든 데이터셋에서 VAE 전처리 후의 잠재 변수는 원시 데이터 대비 R² 점수가 평균 0.15~0.30 상승했다. 특히 힘과 표면 각도 추정에서 선형 회귀는 원시 데이터에서 0.32 → 0.27, 4.02° → 3.18° 등 낮은 성능을 보였지만, 잠재 공간에서는 0.34 → 0.36, 3.69° → 3.70° 등 개선되었다. 이는 VAE가 중요한 물리적 특징을 개별 잠재 변수에 할당해, 선형 모델이 효과적으로 학습할 수 있게 만든 결과이다.
2. 분류 성능: 곡률 데이터에 대한 선형 분류 실험에서 원시 데이터는 클래스 간 혼동이 심했으나, VAE 전처리 후에는 정확도가 크게 상승했다. 혼동 행렬을 비교하면, 원시 데이터에서는 5개 클래스 중 2~3개가 서로 혼동되는 반면, 잠재 공간에서는 대부분의 샘플이 올바른 클래스에 매핑되었다.
3. 라벨이 적은 상황에서의 캘리브레이션: 저자들은 소량(수십 개)의 라벨만으로 잠재 변수와 물리량 사이의 선형 매핑을 학습했다. 이 매핑을 통해 새로운 센서에 대해 빠르게 물리량을 추정할 수 있었으며, 기존의 대규모 라벨링 작업을 대체할 수 있음을 시사한다.
시각적 분석에서도 원시 데이터는 비선형 응답과 다수 taxel의 동시 활성화(특히 BioTac) 혹은 희소 활성화(iCub)로 인해 해석이 어려웠다. 반면 VAE 잠재 변수는 5~10개의 차원으로 압축돼, 각 차원이 특정 물리량(힘, 각도, 경도 등)과 강하게 상관관계를 보였다.
논문의 한계점으로는 잠재 차원의 선택이 고정돼 있어 복잡한 촉각 상황에서 정보 손실 가능성이 있다. 또한 실험은 정적인 접촉과 제한된 물질에 국한돼 실제 로봇 작업에서의 일반화 검증이 필요하다. 향후 연구 방향으로는 멀티모달 VAE(촉각·진동·온도 동시 처리), 온라인 학습을 통한 실시간 적응, 그리고 잠재 차원 자동 선택 메커니즘을 제안한다.
결론적으로, 비지도 VAE 기반 전처리는 촉각 데이터의 차원을 효과적으로 축소하고, 라벨이 거의 없는 상황에서도 물리량 예측·제어에 충분히 활용될 수 있음을 실험적으로 입증하였다. 이는 촉각 센서의 실용성을 크게 향상시키는 중요한 진전이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기