마찰 제어와 모터‑텐던 구동을 이용한 소프트 로봇 설계 및 이동 제어
초록
본 논문은 3D 프린팅으로 제작한 소프트 바디에 모터‑텐던 구동을 적용하고, 두 가지 마찰 조절 메커니즘(가상 그립 및 일방향 클러치)을 이용해 지면과의 마찰을 제어함으로써 전진·회전 locomotion을 구현한다. 또한 연속적인 접촉 상태를 이산화하고 실험 기반 학습을 통해 모델‑프리 제어 시퀀스를 최적화하는 프레임워크를 제안한다.
상세 분석
이 연구는 소프트 로봇의 설계와 제어를 두 축으로 접근한다. 첫 번째 축은 하드웨어 설계이다. 저자는 Stratasys Connex 500 프린터를 활용해 Shore A 26‑28의 연질 재료(TangoPlus)와 Shore D 83‑86의 경질 재료(VeroClear)를 동시에 적층함으로써, 연성 바디와 경질 보강부를 일체화한 모듈형 구조를 구현한다. 연질 바디는 가로 리브를 삽입해 구조적 이방성을 부여하고, 과도한 인장에 대비한다. 텐던은 나일론 어업줄을 사용해 모터‑풀리 시스템으로 길이를 제어하며, 텐던 경로는 Autodesk Inventor의 정적 응력 해석을 통해 Z‑축 변위 구배와 정규력(마찰) 프로파일을 예측하도록 설계된다. 텐던 경로는 시그모이드 형태로 배치돼 비대칭적인 변형을 유도하고, 이는 양쪽 접촉점의 정상력 차이를 만들어 마찰 차동을 발생시킨다.
두 번째 축은 마찰 조절 메커니즘이다. ‘가상 그립’은 접촉면에 연질(M₁)과 경질(M₂) 재료를 교차 배치해 접촉 각도 ψ가 임계각 ψ*를 초과하면 마찰 계수가 낮은 경질 재료로 전환되도록 설계된다. 이는 로봇이 굽힘에 따라 접촉 재질이 바뀌어 한쪽은 고마찰, 다른쪽은 저마찰 상태가 순환하도록 만든다. ‘일방향 클러치’는 회전 자유도가 한 방향에만 허용되는 자유 휠 구조로, 전진 방향에서는 내부 베어링의 저마찰을, 후진 방향에서는 롤러와 바닥 사이의 높은 마찰을 이용한다. 두 메커니즘 모두 추가 구동 없이 로봇의 형태 변화만으로 마찰을 동적으로 전환한다는 점에서 효율적이다.
제어 측면에서는 연속적인 물리 모델링 대신 ‘이산 상태’ 접근을 채택한다. 로봇‑환경 상호작용을 지배하는 변수(예: 각 접촉점의 마찰 상태)를 ‘상태’로 정의하고, 각 상태 전이마다 관측된 이동량(Δx, Δθ)을 데이터베이스에 저장한다. 이후 목표 움직임(전진 거리 혹은 회전 각도)에 대해 비용 함수(예: 이동 오차와 에너지 소비)를 최소화하는 상태 전이 시퀀스를 탐색한다. 이 과정은 강화학습이나 유전 알고리즘이 아닌, 직접 실험을 통한 ‘모델‑프리’ 학습으로 구현된다. 따라서 재료 비선형성, 텐던 경로 복잡성, 마찰 비선형성 등을 별도 모델링할 필요가 없으며, 새로운 마찰 메커니즘이나 텐던 설계가 추가될 때도 동일한 프레임워크를 그대로 적용할 수 있다.
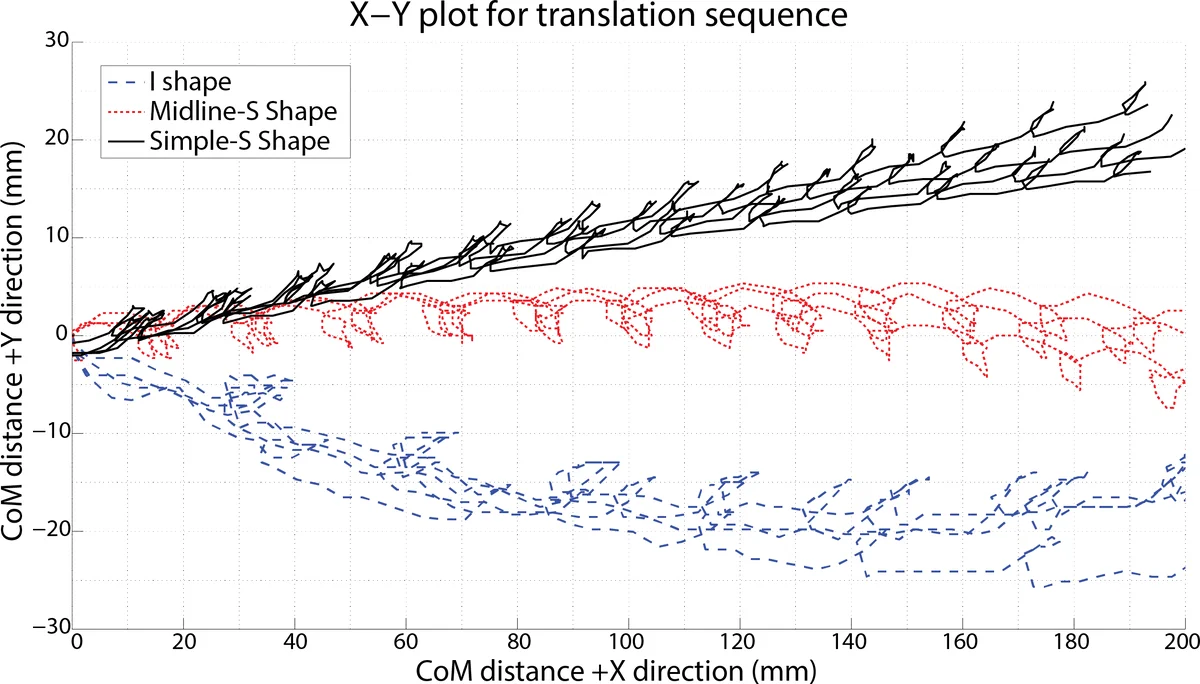
실험에서는 가상 그립과 일방향 클러치를 각각 적용한 로봇을 제작하고, 평탄한 바닥과 거친 표면에서 전진·회전 gait를 수행시켰다. 결과는 텐던 경로 형태가 변형 강도와 마찰 구배에 미치는 영향, 그리고 제어 시퀀스가 목표 이동을 얼마나 정확히 달성했는지를 정량적으로 보여준다. 특히, 동일한 제어 프레임워크가 서로 다른 마찰 메커니즘과 텐던 설계에 대해 동일한 수준의 성능을 유지함을 입증함으로써 범용성을 강조한다.
핵심 인사이트는 다음과 같다. ① 다중 재료 3D 프린팅은 복합 구조와 경로 내장 텐던을 동시에 구현할 수 있는 효율적인 제조 방법이다. ② 텐던 경로 설계에 정적 응력 해석을 활용하면, 복잡한 연성 구조에서도 목표 변형을 예측적으로 설계할 수 있다. ③ 마찰 조절을 로봇 형태 변화에 의존시킴으로써 추가 구동 장치를 배제하고, 경량·고속 구동을 가능하게 한다. ④ 이산 상태 기반 모델‑프리 학습은 소프트 로봇의 비선형·불확실한 동역학을 회피하고, 실제 환경에서 바로 적용 가능한 제어 시퀀스를 도출한다. ⑤ 실험 검증을 통해 제안된 설계·제어 방법론이 다양한 물리적 변형과 마찰 조건에 대해 일관된 locomotion 성능을 제공함을 확인하였다.
댓글 및 학술 토론
Loading comments...
의견 남기기