자율 교통신호의 복잡성 측정: 셀프‑오가니제이션 vs 그린웨이브
초록
본 논문은 정보이론 기반의 발생·자기조직·복잡성 지표를 활용해, 전통적인 그린웨이브 방식과 제안된 셀프‑오가니제이션 교통신호 제어를 10×10 격자 시뮬레이션에서 비교한다. 순환 경계와 비정향(모비우스/클라인) 경계 두 상황을 검증하고, 각 방법이 보이는 동적 위상(자유 흐름, 간헐적, 그리드락 등)을 정량화한다. 결과는 셀프‑오가니제이션이 거의 최적에 근접한 흐름을 유지하며, 복잡성(C) 지표가 살아있는 시스템 수준에 도달함을 보여준다.
상세 분석
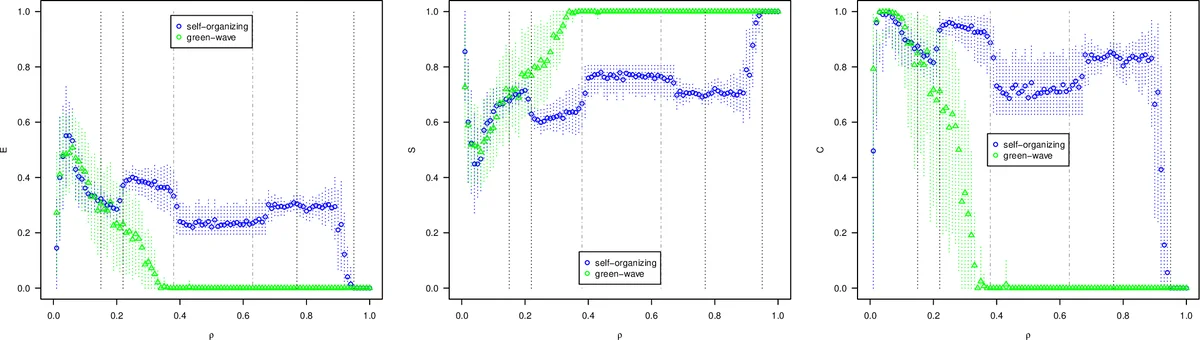
이 연구는 교통 흐름을 셀룰러 오토마타(ECA) 기반의 추상 모델로 구현하고, 교차로마다 신호를 제어하는 두 알고리즘을 비교한다. 그린웨이브는 전역 주기와 위상만을 조정하는 고정 방식으로, 신호 전환 간격이 완전히 규칙적이어서 발생(E)과 복잡성(C)이 0, 자기조직(S)이 1에 수렴한다. 반면 셀프‑오가니제이션은 6개의 로컬 규칙을 통해 차량 대기량, 최소 녹색 시간, 플라톤 유지, 차선 차단 등을 실시간으로 판단한다. 이러한 규칙은 밀도 ρ에 따라 동적으로 전환되며, 결과적으로 신호 전환 간격이 비정규적(높은 E, 낮은 S)에서 거의 정규적(낮은 E, 높은 S)까지 연속적으로 변한다.
논문은 발생(E)=정보량(I)로 정의하고, 자기조직(S)=1‑E, 복잡성(C)=4·E·S 로 정규화한다. 이 정의는 완전 질서(E=0, S=1, C=0)와 완전 혼돈(E=1, S=0, C=0) 사이에서 C가 최대가 되는 ‘중간’ 상태를 포착한다. 시뮬레이션 결과, 셀프‑오가니제이션은 ρ≈0.150.22 구간에서 quasi‑free flow, ρ≈0.380.63 구간에서 full‑capacity intermittent 등 여섯 개 이상의 동적 위상을 보이며, 각 위상에서 E와 S가 상호 보완적으로 변한다. 특히 quasi‑gridlock 단계에서는 신호 전환이 가장 불규칙해져 E가 최고치에 도달하고, 이는 시스템이 높은 적응성을 요구하는 상황임을 의미한다.
비정향 경계(모비우스/클라인) 실험에서는 순환 경계에서 관찰된 주기적 패턴이 사라지고, 차량 흐름의 상관관계가 파괴된다. 그 결과, 셀프‑오가니제이션은 여전히 높은 C를 유지하지만, 특정 밀도 구간에서 E와 S의 변동폭이 확대된다. 이는 경계 조건이 시스템의 전역 상관성을 어떻게 억제하고, 로컬 규칙 기반 적응이 얼마나 강인한지를 보여준다.
또한, 최적성 곡선과 비교했을 때 셀프‑오가니제이션은 거의 모든 ρ 구간에서 이론적 최적 흐름(J_max=0.25)에 근접한다. 그린웨이브는 중간 밀도에서 급격히 성능이 저하되며, 이는 고정된 위상이 실제 차량 속도와 맞지 않을 때 발생하는 ‘그리드락’ 현상과 일치한다.
전체적으로, 정보이론적 복잡성 지표는 교통 신호 제어의 동적 특성을 정량화하는 강력한 도구임을 입증한다. 특히 C가 살아있는 시스템 수준에 도달한다는 결론은, 셀프‑오가니제이션이 단순히 효율을 높이는 것을 넘어, 환경 변화에 대한 적응성과 구조적 안정성을 동시에 확보한다는 의미다.
댓글 및 학술 토론
Loading comments...
의견 남기기