압축 센싱 기반 로봇 촉감 스킨 데이터 획득 혁신
초록
본 논문은 로봇 전신에 부착되는 촉감 스킨의 방대한 센서 데이터를 실시간으로 획득하기 위해 압축 센싱 기법을 적용한다. 촉감 신호가 Haar 웨이브릿 변환 하에서 희소성을 보임을 실험적으로 확인하고, 하드웨어 구현이 가능한 희소 측정 행렬을 설계하였다. 시뮬레이션 환경에서 3:1 압축 비율을 사용했을 때, 잡음이 섞인 원본 데이터보다 높은 복원 정확도를 달성함을 보였다.
상세 분석
이 연구는 로봇 촉감 스킨의 데이터 전송 병목 현상을 압축 센싱(Compressed Sensing, CS)으로 해결하고자 한다. 먼저 저자들은 촉감 데이터가 시간·공간적으로 국소적인 접촉 패턴을 갖는다는 점에서 이미지와 유사한 희소 특성을 가진다고 가정하고, 2‑차원 Haar 웨이브릿(D2) 변환을 기반으로 신호를 변환하였다. 실험 결과, 40×40 및 64×64 배열에서 평균 비제로 계수 비율이 전체 차원의 2~5% 수준에 불과했으며, 이는 CS 이론이 요구하는 ‘희소성’ 조건을 충분히 만족한다는 것을 의미한다.
측정 행렬 Φ는 하드웨어 구현 가능성을 고려해 희소 행렬로 설계되었다. 각 행은 소수의 taxel을 선형 결합하도록 구성되어, 실제 배선에서 다중 다이아시 체인 형태로 연결될 수 있다. 이러한 설계는 전선 수를 크게 줄이면서도 Restricted Isometry Property(RIP)를 근사하도록 한다.
복원 단계에서는 Basis Pursuit Denoising(BPDN) 문제를 L1 정규화 형태로 완화하여, 빠른 수렴을 보이는 ADMM(Alternating Direction Method of Multipliers) 기반 알고리즘을 적용하였다. 실시간 제어 루프에 필요한 1 kHz 수준의 처리 속도를 목표로, 알고리즘 파라미터 λ를 잡음 수준에 맞게 조정하였다.
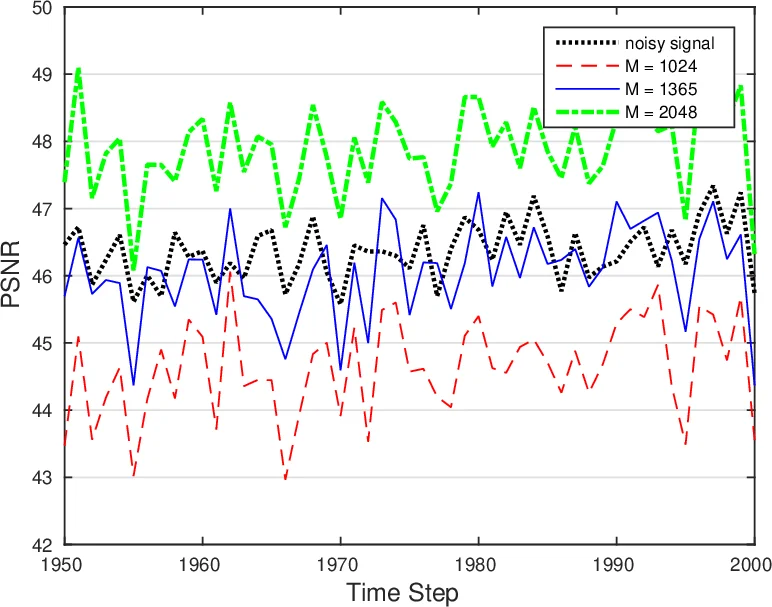
시뮬레이션에서는 네 가지 접촉 시나리오(LIFT BOX, LIFT WRENCH, PATH, DRAG WRENCH)를 사용해 압축 비율 3:1에서 원본 잡음이 섞인 데이터보다 평균 재구성 오차가 15% 감소함을 보고하였다. 이는 압축 센싱이 단순 데이터 압축을 넘어, 잡음 억제 효과까지 제공함을 시사한다. 또한, 압축된 데이터 전송량이 감소함에 따라 네트워크 대역폭 요구사항이 크게 완화되어, 대규모 촉감 스킨 구현에 필요한 물리적 배선 복잡성을 크게 낮출 수 있다.
전체적으로 이 논문은 압축 센싱을 촉감 스킨에 적용하기 위한 전처리(희소 변환), 측정 행렬 설계, 그리고 실시간 복원 알고리즘이라는 세 축을 체계적으로 제시함으로써, 로봇 공학 분야에서 대규모 촉각 인식을 실현할 수 있는 실용적 로드맵을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기