가우시안 센서 네트워크를 위한 전력‑왜곡 기반 경로 계획
** 본 논문은 가우시안 다중접속 채널 위에서 센서들의 전력‑왜곡 관계를 분석하고, 이를 이용해 이동 로봇(AV)의 최적 경로를 설계한다. 두 가지 복원 목표(소스 복원, 필드 복원)를 설정하고, 증폭‑전송(AF) 스킴을 통한 상한과 데이터 처리 불등식·최대 상관성 텐서화에 기반한 하한을 도출한다. 가중합 전력 제약 하에서 폐쇄형 최적 전력 할당식을 얻고, 상·하한 간 격차를 정량화한 뒤, 이를 경로 계획 알고리즘에 적용해 네트워크 파라미터…
저자: Emrah Akyol, Urbashi Mitra
**
본 논문은 자율 이동형 데이터 수집 차량(AV)이 넓은 환경에서 배치된 가우시안 센서 네트워크와 통신하면서, 전력 소비와 복원 왜곡 사이의 근본적인 관계를 규명하고 이를 기반으로 효율적인 경로 계획 방법을 제시한다. 연구는 크게 네 부분으로 구성된다.
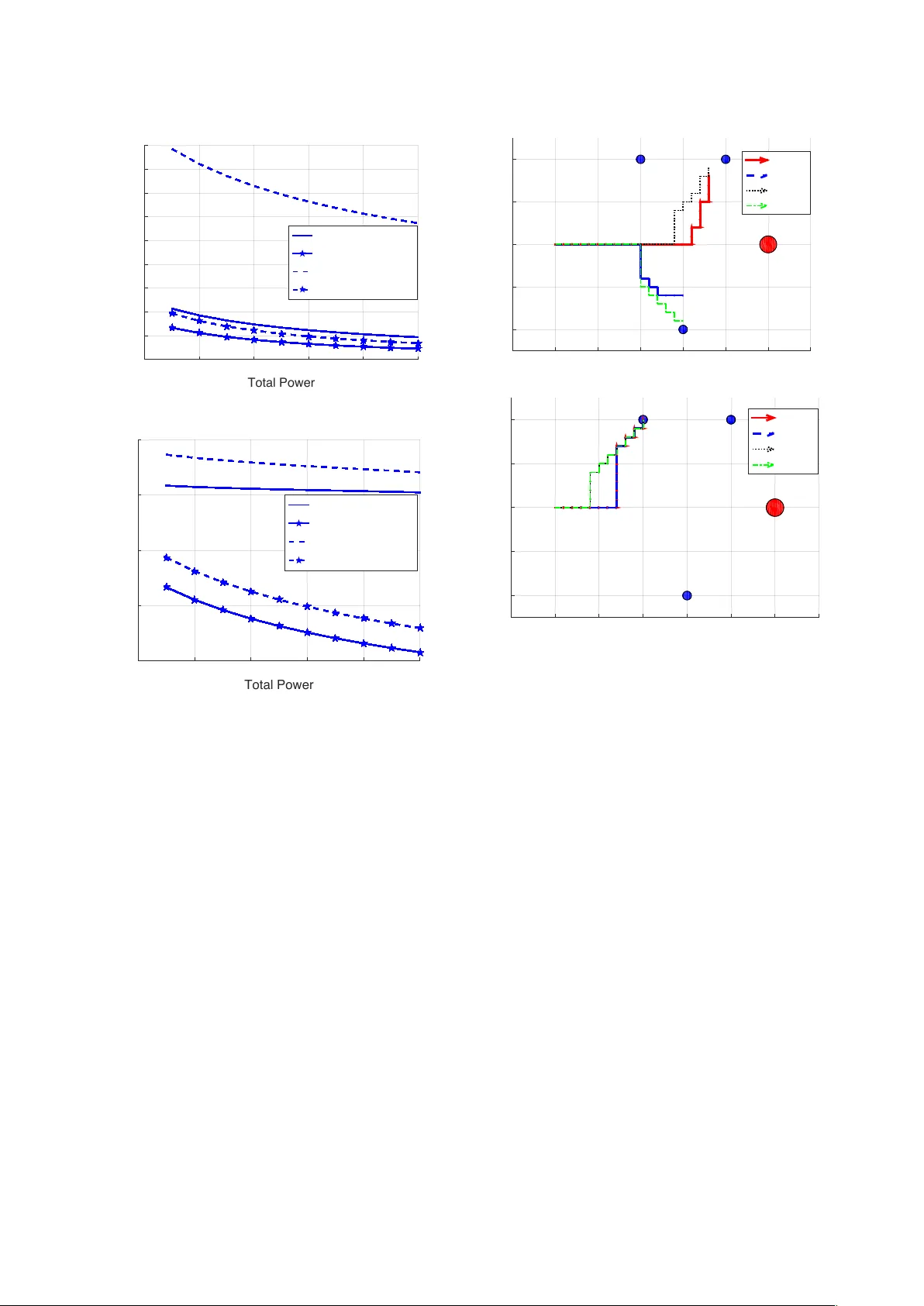
첫 번째 부분에서는 시스템 모델을 정의한다. 원본 신호 S는 평균 0, 분산 1인 i.i.d. 가우시안이며, M개의 정적 센서는 각각 Uₘ = βₘS + Wₘ (Wₘ ~ N(0,1)) 로 관측한다. 센서는 전송 파워 제한 Pₘ 혹은 가중합 전력 제약 ΣrₘPₘ ≤ P_T 를 만족하도록 채널 입력 Xₘ를 생성한다. 다중접속 채널은 Y = ΣαₘXₘ + Z (Z ~ N(0,1)) 로 모델링된다. 두 가지 복원 목표가 정의된다. (1) **소스 복원(SR)** 은 AV가 S를 최소 MSE로 추정하는 것이며, (2) **필드 복원(FR)** 은 AV가 각 센서의 관측값 Uₘ을 가중합 왜곡 ΣγₘE
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기