자율 로봇과 자동 에토그램을 활용한 병아리 행동 변이 및 친자 인쇄 분석
초록
본 연구는 자율 로봇을 이용해 병아리(Gallus gallus domesticus)의 친자 인쇄 과정을 유도하고, 고속 영상 분석으로 개별 행동 데이터를 자동 추출·분류한다. 205마리의 병아리를 대상으로 로봇에 대한 반응을 세 가지 유형(인쇄, 무반응, 회피)으로 구분하고, SVM 기반 분류와 자동 에토그램 생성으로 행동 변이를 정량화하였다. 결과는 개체 간 행동 및 인쇄 성공률에 큰 차이가 있음을 보여준다.
상세 분석
이 논문은 사회성 동물의 개체별 행동 변이를 정량적으로 파악하기 위해 두 가지 핵심 기술을 결합한다. 첫째, ‘PoulBot’이라 명명된 자율 로봇은 색·움직임·소리 등 친자 인쇄에 필요한 자극을 제공하도록 설계되었으며, 360° 카메라와 근접 적외선 센서를 탑재해 실시간으로 병아리의 위치와 속도를 추적한다. 둘째, 실험 영상에서 추출된 좌표, 속도, 가속도, 로봇과의 거리 등 3차원 특징을 기반으로 자동 에토그램을 생성한다.
데이터 전처리 단계에서는 각 시간 스텝마다 특징 벡터를 구성하고, 차원 축소를 위해 주성분 분석(PCA)을 적용해 두 개의 주요 축으로 압축한다. 이후 인간 관찰자가 라벨링한 64마리(전체 31.22%) 데이터를 학습 데이터로 사용해 선형 서포트 벡터 머신(SVM) 분류기를 훈련시켰다. 사용된 입력 변수는 평균 거리, 평균 속도, 속도 표준편차이며, 이 세 변수만으로도 98.05%의 정확도로 205마리 전체를 세 유형으로 구분한다.
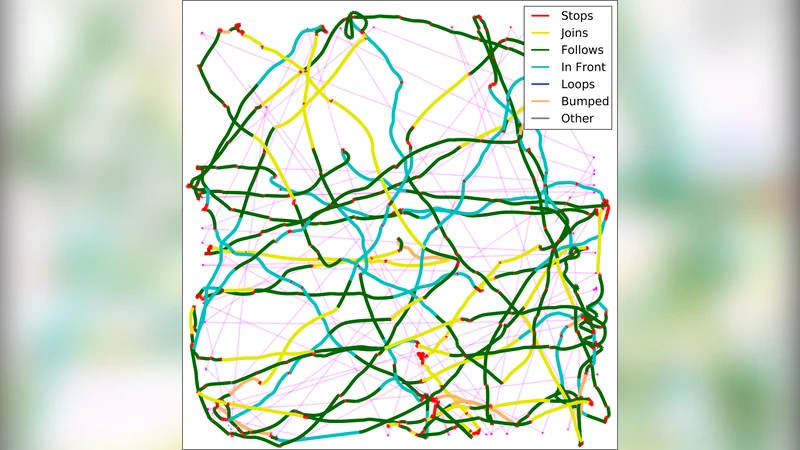
자동 에토그램 생성은 두 단계로 이루어진다. 첫 번째는 연속적인 움직임 궤적을 일정 길이의 세그먼트로 분할하는 ‘Segmentation’ 과정이며, 여기서는 속도 변화와 거리 변동을 기준으로 동적 윈도우를 적용했다. 두 번째는 각 세그먼트에 행동 라벨을 부여하는 ‘Labeling’ 단계로, 여기서는 군집화(k‑means)와 지도학습 기반 분류를 병행해 ‘걷기·정지’, ‘추적’, ‘회피’ 등 5가지 기본 행동을 정의하였다.
실험 결과는 세 가지 주요 발견을 제시한다. 첫째, 병아리 개체 간 친자 인쇄 성공률이 크게 다르며, 전체의 55.12%가 로봇을 ‘모성’ 대상으로 인쇄했지만 36.10%는 무반응, 8.78%는 회피 행동을 보였다. 둘째, 인쇄된 개체는 로봇에 가까이 머무르며 속도가 변동적인 반면, 회피 개체는 높은 평균 속도로 주변 벽을 따라 이동한다. 셋째, 자동 에토그램을 통해 장시간(1시간) 행동 패턴을 정량화함으로써 인간 관찰에 비해 3배 이상 빠른 데이터 처리와 일관된 라벨링이 가능함을 입증했다.
이러한 접근법은 로봇을 통한 정밀 자극 제어와 고속 영상 기반 자동 분석을 결합함으로써, 기존 인간 주관에 의존하던 행동학 연구의 재현성 및 확장성을 크게 향상시킨다. 다만 로봇의 물리적 디자인(색상·소리·속도 패턴)과 실험 환경(조명·소음) 등이 행동 결과에 미치는 잠재적 편향을 추가로 검증할 필요가 있다. 또한, 현재 사용된 SVM 분류기는 선형 경계에 제한되므로, 비선형 패턴을 포착하기 위한 딥러닝 기반 모델의 도입이 향후 연구 과제로 제시된다.
댓글 및 학술 토론
Loading comments...
의견 남기기