지원 핀을 활용한 연속 로봇 재배치 전략
초록
본 논문은 평면만을 이용한 기존의 픽‑앤‑플레이 재배치 방식에 수직 핀을 추가함으로써 중간 배치의 안정성 및 다양성을 크게 향상시키는 방법을 제안한다. 물체의 컨벡스 헐의 엣지와 핀 접촉점을 조합해 가능한 모든 안정 배치를 자동으로 생성하고, 각각에 대해 힘‑폐쇄 그립을 탐색한다. 이렇게 얻은 배치‑그립 정보를 기반으로 재배치 그래프를 구축하고 최단 경로 탐색을 통해 효율적인 재배치 시퀀스를 도출한다. 실험 결과, 핀을 이용한 경우 재배치 성공률과 시퀀스 길이 모두 크게 개선됨을 확인하였다.
상세 분석
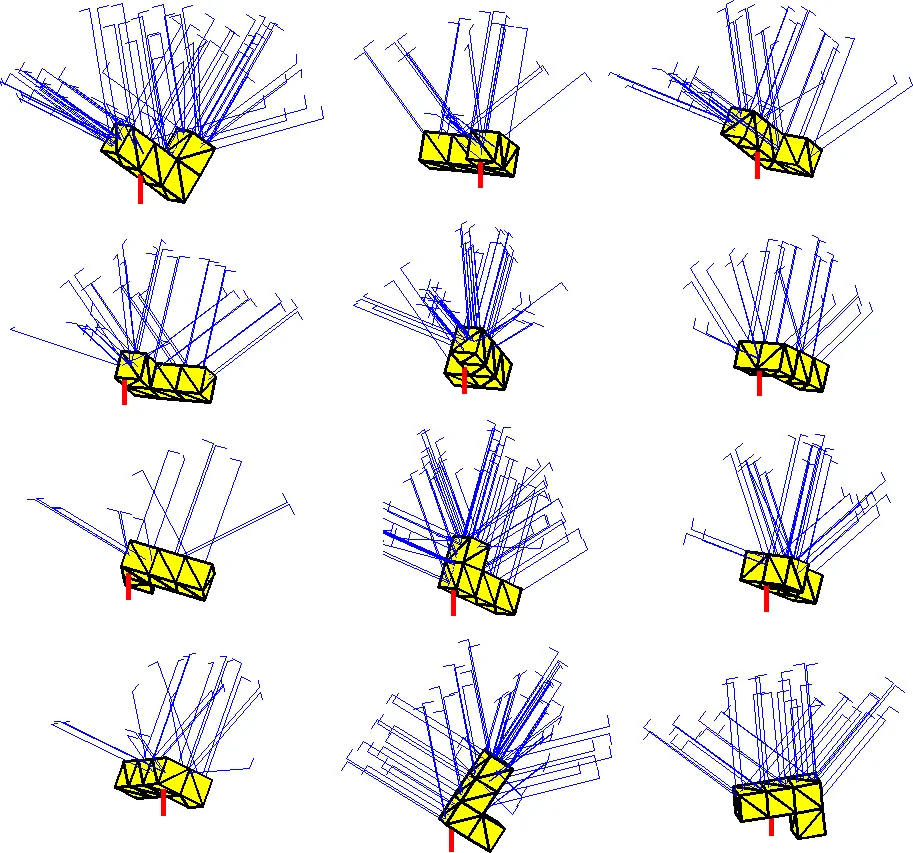
이 연구는 로봇이 단일 그립으로 도달할 수 없는 목표 자세를 달성하기 위해 다단계 재배치를 활용한다는 전제에서 출발한다. 기존 연구는 평면만을 지지대로 사용했으나, 물체의 컨벡스 헐이 제공하는 면이 제한적이어서 가능한 안정 배치 수가 적고, 그에 따라 재배치 그래프의 연결성이 낮았다. 저자들은 이러한 한계를 극복하기 위해 작업 표면에 수직 핀을 추가하고, 물체가 핀과 평면을 동시에 접촉하도록 설계한다. 구체적으로, 물체 표면을 균일하게 샘플링해 핀 접촉 후보점 x를 얻고, 컨벡스 헐의 모든 엣지 e를 추출한다. 각 (e, x) 쌍에 대해 핀 길이 l을 만족하는 기저점 b를 해석적으로 계산하고, 충돌, 안정성(무게중심이 삼각형 e₁e₂b 내부에 위치), 마찰 각도 조건을 검증한다. 유효한 배치는 물체의 무게중심이 높은 순으로 선택되어, 그립 충돌 여유 공간을 최대화한다. 이후, 물체 전체에 대해 힘‑폐쇄 그립 집합 G를 사전 계산하고, 각 배치에 대해 G를 변환해 충돌·역기구학 제약을 만족하는 부분집합을 추출한다. 이렇게 얻어진 배치‑그립 매핑을 기반으로 두 층 구조의 재배치 그래프를 구성한다. 상위 층은 배치 간 연결성을 나타내며, 하위 층은 동일 배치 내에서 가능한 그립 전환을 표현한다. 그래프 탐색 단계에서는 초기·목표 배치를 노드로 설정하고, 다익스트라와 유사한 최단 경로 알고리즘으로 최소 재배치 횟수를 찾는다. 실험에서는 다양한 메쉬 모델, 핀 길이, 초기·목표 자세를 무작위로 설정하고, 성공률과 시퀀스 길이를 비교하였다. 결과는 핀을 사용했을 때 평균 성공률이 30 % 이상 상승하고, 필요한 재배치 단계가 1‑2 단계 감소함을 보여준다. 특히, 뚜껑 형태와 같이 평면만으로는 회전이 어려운 물체에 대해 핀은 결정적인 역할을 한다. 이와 같이 핀 기반 중간 지지는 배치 다양성을 크게 확대하고, 그래프 연결성을 강화해 로봇 재배치 계획의 효율성을 근본적으로 향상시킨다.
댓글 및 학술 토론
Loading comments...
의견 남기기