모바일 폰으로 실시간 이미지 클러스터링 구현하기
초록
본 논문은 여러 스마트폰의 연산 자원을 결합하고, 안드로이드 NDK 기반 최적화와 컨텍스트 기반 시드( GPS·EXIF) 및 근사 K‑Means 알고리즘을 적용해 이미지 특징 추출‑벡터화‑클러스터링 전체 파이프라인을 완전 분산으로 수행한다. 최적화 전 11분 이상 걸리던 작업을 75 % 단축해 1분 내외로 처리함으로써, 클라우드 의존도를 크게 낮추고 모바일‑엣지 컴퓨팅의 가능성을 입증한다.
상세 분석
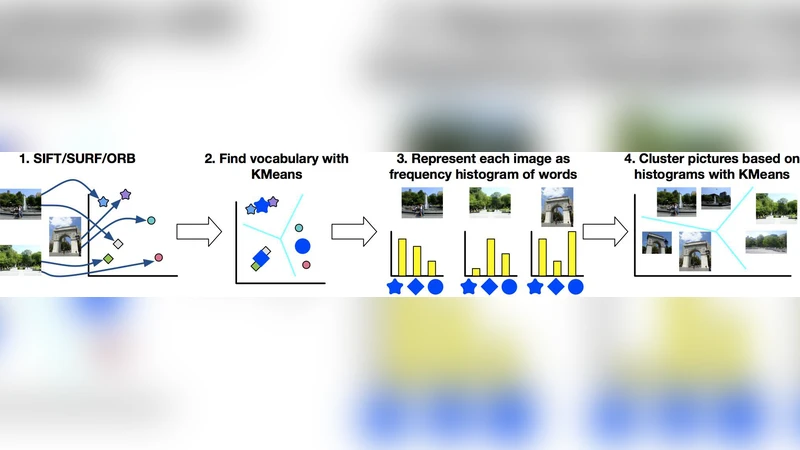
이 연구는 모바일 기기의 연산 능력이 급격히 향상된 현 시점에서, 전통적으로 클라우드에 의존해 왔던 이미지 처리 파이프라인을 완전하게 단말 측에서 실행할 수 있음을 실증한다. 핵심은 네 단계( SIFT 특징 추출 → 첫 번째 K‑Means로 어휘 사전 구축 → BoW 벡터화 → 두 번째 K‑Means로 이미지 클러스터링)로 구성된 파이프라인을 세 대의 스마트폰(Nexus 5, Nexus 6, Galaxy S4) 사이에 분산시킨 점이다.
첫 번째 최적화는 Android NDK를 이용해 C/C++ 네이티브 코드로 전환한 것으로, SDK 기반 Java 구현 대비 10배 이상 빠른 실행 시간을 확보한다. 이는 이미지당 수천 개의 SIFT 디스크립터와 고차원 벡터 연산을 효율적으로 처리할 수 있게 해준다.
두 번째 최적화는 K‑Means 알고리즘의 계산 복잡도를 감소시키는 근사 기법이다. 기존 연구에서 제시된 ‘활성 포인트(active points)’ 개념을 차용해, 첫 번째 반복에서 클러스터 소속이 변한 포인트만을 이후 반복에 포함한다. 실험 결과 전체 포인트의 약 70 %가 활성 포인트였으며, 이 중 90 %는 r‑값이 0.1 이하로 매우 작은 변동만을 보였다. 비활성 포인트를 제외함으로써 두 번째 K‑Means 단계의 실행 시간을 41 % 단축, 전체 파이프라인을 679 초에서 395 초로 감소시켰다.
세 번째 최적화는 컨텍스트 정보를 활용한 초기 시드(seed) 설정이다. 이미지 메타데이터인 GPS 좌표와 EXIF(방향·카메라 설정)를 기반으로 초기 클러스터 중심을 추정하면, 초기 할당 단계에서의 재배치 횟수가 크게 줄어든다. 실험에서는 GPS와 EXIF를 모두 사용했을 때, 초기 K‑Means 수렴 속도가 가장 빨라 전체 파이프라인이 추가로 10 % 정도 가속되었다.
이러한 최적화들을 조합한 최종 시스템은 동일한 데이터셋(각 폰당 37장, 총 111장)에서 75 % 이상의 시간 절감 효과를 보였으며, 클러스터 품질(클러스터 유사도)도 75 % 이상을 유지했다. 논문은 또한 네트워크 대역폭이 제한된 상황에서 ‘컴퓨팅‑우선’ 모드와 ‘네트워크‑우선’ 모드 사이를 동적으로 전환하는 모델을 제시했으며, 실험적 측정값을 기반으로 한 간단한 수식 모델을 통해 전환 시점과 기대 성능을 예측한다.
하지만 몇 가지 한계점도 존재한다. 첫째, SIFT는 여전히 연산량이 큰 특징 추출기법이며, 모바일 환경에서 더 가벼운 ORB나 SURF를 사용할 경우 정확도 저하가 관찰되었다. 둘째, 현재 구현은 3대의 고성능 스마트폰에 국한돼 있어, 저사양 기기에서의 확장성 검증이 부족하다. 셋째, 클러스터링 품질 평가는 주관적 시각 평가에 의존했으며, 정량적 지표(예: NMI, ARI)와 비교 실험이 부족하다. 향후 연구에서는 경량화된 딥러닝 기반 특징 추출, 더 큰 규모의 모바일 클러스터, 그리고 다양한 품질 지표를 통한 정량적 평가가 필요하다.
전반적으로 이 논문은 모바일 엣지 컴퓨팅이 단순히 연산을 오프로드하는 수준을 넘어, 협업적 분산 학습·클러스터링까지 수행할 수 있음을 보여준다. 이는 프라이버시 보호, 네트워크 불안정 상황 대응, 그리고 클라우드 비용 절감 측면에서 실용적인 가치를 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기