호기심 기반 장기 자율 탐사를 위한 모바일 로봇의 실시간 토픽 모델링
초록
**
본 논문은 모바일 로봇이 실시간 토픽 모델링(RoST)을 이용해 환경을 의미론적으로 파악하고, 토픽 퍼플렉시티가 높은 지역을 우선적으로 탐색하도록 경로를 계획함으로써 장기 자율 임무에서 효율적인 데이터 수집과 지속적인 학습을 가능하게 하는 방법을 제안한다. 시뮬레이션과 실제 Aqua 수중 로봇 실험을 통해 기존 탐색 방식보다 높은 정보 이득과 모델 구분력을 입증한다.
**
상세 분석
**
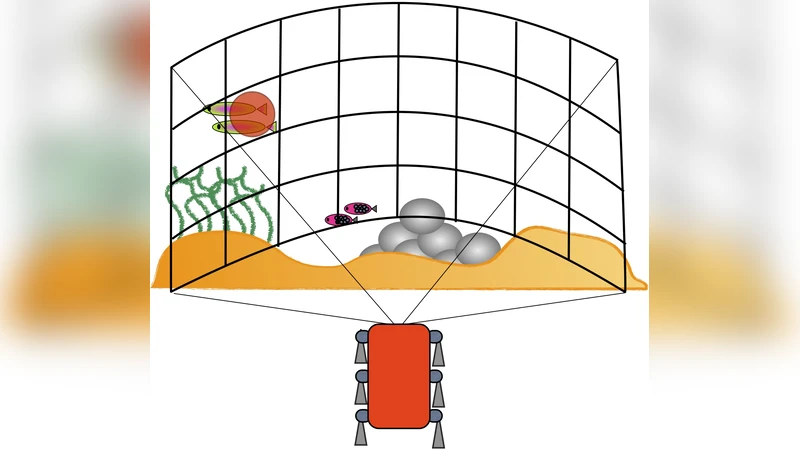
이 연구는 ‘호기심’이라는 개념을 로봇 탐색에 정량화하는 데 초점을 맞추었다. 핵심 아이디어는 로봇이 관측한 이미지 데이터를 단어‑문서 형태로 변환하고, 온라인 토픽 모델링 기법인 Realtime Online Spatiotemporal Topic modeling (RoST)를 적용해 각 관측에 대한 토픽 분포와 전역 토픽‑단어 매트릭스(Φ)를 지속적으로 업데이트하는 것이다. 토픽 모델은 공간‑시간 커널을 이용해 인접 셀들의 토픽 분포를 합산함으로써 계산 복잡도를 크게 낮추면서도 지역적 맥락을 보존한다.
퍼플렉시티는 현재 토픽 모델이 새로운 관측을 얼마나 잘 설명하지 못하는지를 나타내는 지표이며, 이는 정보 이득과 직접적으로 연결된다. 논문에서는 퍼플렉시티가 높은 셀을 ‘호기심‑점’으로 정의하고, 이전에 방문한 위치에 대한 반발 잠재력과 결합해 확률적 경로 선택에 활용한다. 이렇게 하면 로봇은 이미 충분히 학습된 영역을 피하고, 새로운 혹은 불확실한 지형을 집중 탐색하게 된다.
알고리즘 구현 측면에서는 배치 Gibbs 샘플링을 기반으로 한 실시간 샘플러를 설계하였다. 새로운 관측이 들어올 때마다 제한된 시간 안에 토픽 라벨을 재할당하고, 전역 파라미터 Θ와 Φ를 업데이트한다. 셀 기반 근사와 고정된 이터레이션 수 덕분에 연산량이 관측 수에 비례하지 않아 장기 임무에 적합하다.
실험에서는 항공 이미지와 수중 영상 두 종류의 데이터셋을 사용해 시뮬레이션과 실제 Aqua 로봇 실험을 수행했다. 퍼플렉시티 기반 탐색은 전통적인 격자‑채우기(boustrophedon) 경로나 전방 탐색(frontier) 방식에 비해 같은 탐색 거리 내에서 토픽 라벨 정확도가 10~15% 향상되었으며, 특히 희귀 토픽(예: 산호, 어류 군집) 발견률이 크게 증가했다. 또한, 사전 학습 없이도 다중 임무(산호초 검사, 다이버 추적, 해저 탐사)를 수행할 수 있음을 보여준다.
한계점으로는 현재 토픽 수(K)를 고정하고 있으며, 복잡한 3‑D 구조나 동적 환경 변화에 대한 적응성이 제한적이다. 또한, 퍼플렉시티 계산이 이미지 전체가 아닌 섹션 단위로 이루어지므로 섹션 경계에서의 불연속성이 발생할 수 있다. 향후 연구에서는 비정형 토픽 수 자동 조정, 멀티모달 센서 융합, 그리고 강화학습 기반 장기 계획과의 통합을 제안한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기