비선형 동적 네트워크 제어와 제어가능성: 기하학적 접근법
초록
본 논문은 다중 안정성을 갖는 비선형 네트워크, 특히 유전자 조절 네트워크(GRN)를 대상으로 제한된 파라미터 교란을 이용해 원하는 수렴점(어트랙터)으로 전환하는 제어 프레임워크를 제시한다. 어트랙터를 정점으로 하는 ‘어트랙터 네트워크’를 정의하고, 이 네트워크의 연결성 정도를 비선형 시스템의 제어가능성 지표로 활용한다. 실험적으로 구현 가능한 일시적 파라미터 변동을 전제로 하며, 잡음이 오히려 제어를 촉진할 수 있음을 발견한다.
상세 분석
이 연구는 복잡계 네트워크 이론과 비선형 동역학을 결합해, 기존 선형 칼만 이론이 적용되지 못하는 비선형 시스템의 제어문제를 새로운 시각에서 접근한다. 핵심 아이디어는 ‘어트랙터 네트워크(attractor network)’ 개념이다. 시스템이 가질 수 있는 모든 안정 어트랙터를 정점으로 두고, 실험적으로 구현 가능한 파라미터 교란을 통해 한 어트랙터에서 다른 어트랙터로 전이할 수 있으면 방향성 간선을 추가한다. 이렇게 구성된 어트랙터 네트워크는 원래 고차원 연속상태 공간을 크게 축소한 그래프 형태이며, 네트워크의 강한 연결성(strongly‑connected component) 정도가 곧 시스템 전체의 제어가능성을 의미한다.
제어 메커니즘은 주로 ‘바이페이션(bifurcation) 기반 전이’를 이용한다. 파라미터 µ를 일시적으로 변동시켜 시스템을 사전 정의된 임계값 µ_c 근처로 이동시키면, 기존 어트랙터가 사라지고 새로운 어트랙터가 생성되는 ‘사다리꼴(saddle‑node) 바이페이션’이 발생한다. 이때 시스템은 일시적으로 중간 어트랙터(¯x*)에 머무르며, 제어가 종료되면 원래 파라미터값 µ_0으로 복귀하면서 목표 어트랙터 x*_f 로 수렴한다. 중요한 점은 하나의 파라미터만으로 전이가 불가능할 경우, 여러 파라미터를 조합해 다단계 전이 경로를 설계한다는 것이다. 이는 실제 생물학적 실험에서 여러 약물을 동시에 투여하는 상황과 일치한다.
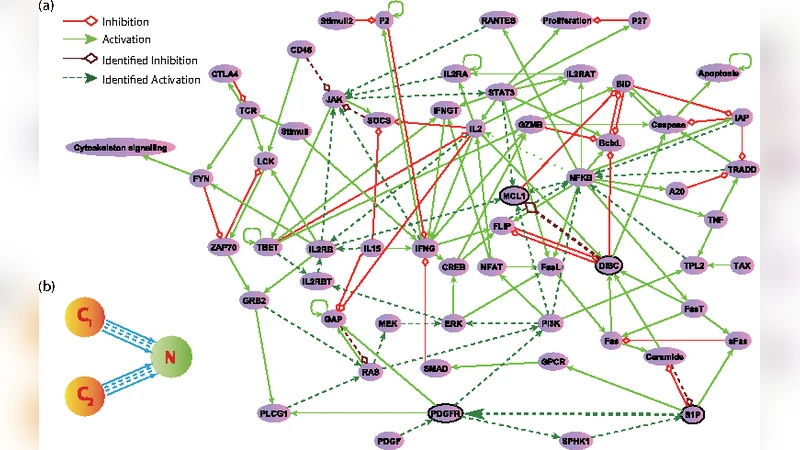
논문은 T‑LGL(대형 과립 림프구 백혈병) 신호망을 60노드, 142엣지 규모의 실제 GRN 모델에 적용한다. Boolean 규칙을 연속형 ODE 형태로 변환하고, 각 엣지의 결합강도를 1로 설정한 뒤 수치 시뮬레이션을 수행한다. 결과적으로 세 개의 안정 고정점(두 개의 암 상태 C1, C2와 정상 상태 N)이 존재함을 확인하고, 48개의 엣지를 대상으로 파라미터 교란을 시도해 모든 암 상태에서 정상 상태로 전이 가능한 경로를 발견한다. 제어 신호는 직사각형 펄스 형태(시간 지속 τ, 진폭 Δµ)로 가정했으며, 최소 제어 시간 τ_m과 파라미터 초과량 Δe(=µ_c‑µ_n) 사이에 τ_m ∝ (Δe)^β 형태의 파워‑법칙 관계가 존재함을 실험적으로 확인했다(β≈0.4).
또한 잡음(노이즈)의 역할을 탐구했는데, 적당한 수준의 외부 잡음이 시스템을 불안정한 경계 근처로 끌어올려 바이페이션을 촉진함으로써 제어 성공률을 높이는 ‘노이즈‑촉진 제어(noise‑facilitated control)’ 현상을 보고한다. 이는 비선형 시스템에서 흔히 관찰되는 ‘stochastic resonance’와 유사하지만, 여기서는 제어 목표가 특정 어트랙터 전이라는 점에서 차별화된다.
이러한 결과는 비선형 네트워크 제어가 반드시 전역적인 상태 공간을 완전 탐색해야 하는 것이 아니라, 어트랙터 간 전이 가능성을 그래프 형태로 정량화함으로써 실용적인 제어 전략을 설계할 수 있음을 시사한다. 특히, 실험적 제약(파라미터 교란의 일시성, 물리적 구현 가능성)을 명시적으로 고려했기 때문에 합성생물학, 약물 설계, 세포 운명 조절 등 실제 응용 분야에 바로 적용 가능하다.
댓글 및 학술 토론
Loading comments...
의견 남기기