속도 차이를 이용한 사이클 상 빠른 만남
초록
길이 n 인 원형 그래프에 서로 다른 속도 c (>1) 를 가진 두 동일 에이전트가 임의의 위치에서 시작한다. 느린 에이전트의 속도를 1로 정규화하고, 빠른 에이전트의 속도를 c 로 두었을 때, 단순히 달리기만 하는 DR 알고리즘의 최악 시간은 n/(c‑1) 이다. 논문은 이 한계가 거의 최적임을 보이는 하한을 제시하고, c ≤ 2인 경우 하한에 정확히 도달하는 알고리즘을, c > 2인 경우 거의 도달하는 알고리즘을 설계한다. 또한 방향 감각이 없고 시작점에만 하나의 표식(돌멩이)만 놓을 수 있는 약한 모델에서도 동일한 성능을 보이며, 표식을 전혀 사용할 수 없는 경우에도 c ≤ 2에 대해 정확한 경계, c > 2에 대해 거의 정확한 경계를 제공한다.
상세 분석
이 논문은 원형 네트워크(길이 n) 위에 두 개의 무식별 에이전트가 서로 다른 이동 속도를 가질 때, 어떻게 하면 최단 시간에 만나게 할 수 있는지를 이론적으로 규명한다. 기본 가정은 에이전트가 자신의 속도가 느린 편인지 빠른 편인지 모른다는 점이며, 따라서 알고리즘은 속도 비율 c 만을 이용해 대칭을 깨야 한다. 가장 직관적인 전략은 두 에이전트가 동시에 전진하는 ‘분산 경주(Distributed‑Race, DR)’이며, 이 경우 상대 속도 차가 c‑1 이므로 최악 상황에서 한 바퀴를 차이만큼 메우는 데 n/(c‑1) 시간이 걸린다. 하지만 c 가 1에 가깝다면 이 시간은 비현실적으로 커진다.
논문은 먼저 하한을 증명한다. adversarial한 초기 배치를 고려하면, 두 에이전트가 서로 마주보는 위치에 있을 때 어느 쪽이 먼저 움직이든 상대 속도 차에 의해 최소 n/(2(c‑1)) 시간이 필요함을 보인다. 여기서 중요한 포인트는 에이전트가 표식을 남기거나 방향 감각을 갖는 등 추가적인 정보를 가질 수 있더라도, 속도 차만으로는 이 하한을 넘을 수 없다는 점이다. c ≤ 3인 경우 하한은 정확히 n/(2(c‑1)) 이며, c > 3이면 약간 더 큰 식으로 조정된다(정확한 상수는 논문에 제시).
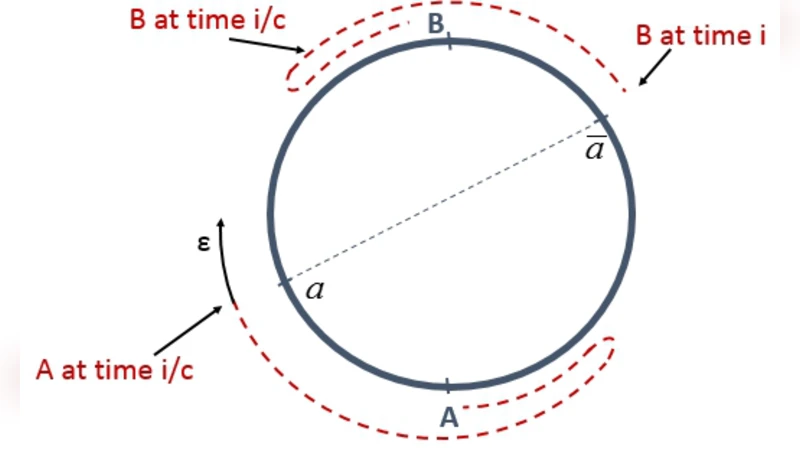
다음으로 알고리즘 설계가 전개된다. c ≤ 2인 경우, 에이전트는 시작점에 하나의 표식(돌멩이)을 남기고, 그 표식을 기준으로 ‘한 바퀴 전진 후 되돌아오기’와 같은 비대칭 움직임을 수행한다. 빠른 에이전트는 표식을 발견하면 즉시 방향을 바꾸어 반대 방향으로 이동하고, 느린 에이전트는 표식을 무시하고 계속 전진한다. 이 과정에서 두 에이전트는 반드시 n/(2(c‑1)) 시간 이내에 만나게 된다. c > 2인 경우에는 표식의 위치와 이동 패턴을 조정해, 빠른 에이전트가 표식을 이용해 더 큰 구간을 스킵하도록 설계한다. 이때 발생하는 오버헤드가 존재하지만, 전체 시간은 하한에 상수 배만큼 차이 나는 수준으로 유지된다.
특히 이 알고리즘은 ‘방향 감각이 없음’과 ‘표식은 시작점에만 하나만 가능’이라는 매우 약한 모델에서도 동작한다. 이는 기존 연구에서 가정하던 전역 좌표계나 무제한 표식 사용보다 훨씬 현실적인 제한이다. 마지막으로 표식을 전혀 사용할 수 없는 경우를 다룬다. 여기서는 에이전트가 미리 정해진 이동 주기를 따르며, 속도 차에 의해 발생하는 위상 차이를 이용해 일정 시간 후 반드시 마주보게 만든다. c ≤ 2에서는 정확히 n/(2(c‑1)) 시간에 만나며, c > 2에서는 상수 배 차이의 상한을 얻는다. 전체적으로 논문은 속도 비대칭을 활용한 대칭 깨기의 새로운 가능성을 제시하고, 이론적 한계와 실용적 알고리즘을 동시에 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기