센서 공격에 강인한 차동 평탄 시스템 상태 복원: SMT 기반 접근
초록
본 논문은 차동 평탄(non‑linear) 시스템에서 일부 센서가 적대적 공격에 의해 변조될 경우, 시스템 상태를 정확히 복원할 수 있는 이론적 조건과 실용적인 알고리즘을 제시한다. s‑sparse observability 개념을 비선형 시스템에 일반화하고, 이를 기반으로 SMT(Satisfiability Modulo Theory) 솔버를 활용한 효율적인 공격 탐지·상태 복원 절차를 설계하였다. quadrotor 사례 실험을 통해 제안 방법의 유효성을 입증하였다.
상세 분석
이 논문은 기존에 선형 시스템에 한정되었던 s‑sparse observability 개념을 차동 평탄 시스템이라는 넓은 비선형 클래스에 확장한다. 차동 평탄성은 시스템의 상태와 입력을 제한된 수의 출력(평탄 출력)과 그 과거값만으로 재구성할 수 있음을 의미한다. 저자들은 먼저 공격 모델을 s‑sparse 벡터 a(t) 로 정의하고, 공격이 없는 경우의 시스템 Σ 를 정의한 뒤, 공격이 포함된 시스템 Σ_a 를 (x(t+1)=f(x(t),u(t)), y(t)=h(x(t))+a(t)) 형태로 기술한다.
핵심 이론적 결과는 두 가지 정리이다. 정의 III.4에 의해 s‑sparse τ‑observable 시스템은 어떤 p‑s개의 센서가 손상되더라도 남은 p‑s 센서만으로 상태를 완전히 식별할 수 있음을 의미한다. 정리 III.6은 2s‑sparse τ‑observability 가 상태 복원 문제(Problem II.1)의 해 존재에 대한 필요충분조건임을 증명한다. 증명 과정에서, 복원된 상태 x와 실제 상태 x가 일치하면 추정된 공격 지시자 b는 실제 공격 지시자 b 를 포함한다는 Proposition III.5 를 활용한다. 반대로, 2s‑sparse observability 가 성립하지 않을 경우, p‑2s개의 정상 센서만으로 두 서로 다른 상태가 구별되지 않아 복원이 불가능함을 보인다.
차동 평탄성을 이용해 s‑sparse flat 시스템을 정의함으로써, s‑sparse flatness 가 s‑sparse τ‑observability 를 자동으로 만족함을 확인한다. 이는 평탄 출력 집합이 충분히 풍부하면 비선형 관측식이 선형화된 형태와 동일하게 다루어질 수 있음을 시사한다.
알고리즘적 측면에서는, 상태 복원 문제를 부울 변수 b와 연속 변수 x 사이의 혼합 제약식으로 모델링하고, 이를 lazy SMT 패러다임에 맞춰 IMHOTEP‑SMT 프레임워크에 통합한다. SMT 솔버는 먼저 부울 부분(어떤 센서가 공격당했는지)에서 가능한 조합을 탐색하고, 각 조합에 대해 비선형 방정식 H_u,Γ(x)=Y_Γ 를 풀어 상태 x를 검증한다. 이 과정은 전통적인 조합 탐색( C(p,s) )에 비해 탐색 공간을 크게 축소한다.
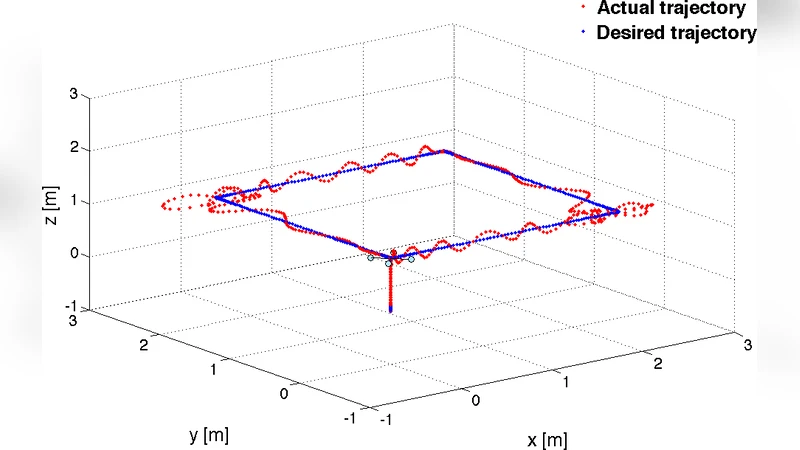
실험에서는 6개의 센서를 가진 quadrotor 모델에 대해, 최대 2개의 센서를 임의로 변조하는 시나리오를 설정하였다. 차동 평탄성을 이용해 출력(위치·각도·속도 등)으로부터 상태와 입력을 재구성하고, SMT 기반 탐지·복원 절차가 정확히 공격 센서를 식별하고 정상 상태를 복원함을 보였다. 특히, 공격이 지속적으로 변동하거나 비정형적인 신호를 포함하더라도 알고리즘이 수렴하는 점이 강조된다.
전체적으로 이 논문은 (1) 비선형 차동 평탄 시스템에 대한 s‑sparse observability 이론을 정립하고, (2) SMT 기반의 실용적인 복원 알고리즘을 제시하며, (3) 실제 항공기 제어 사례를 통해 방법론의 실효성을 검증한다는 세 축을 갖는다. 이는 사이버‑물리 시스템 보안 분야에서 비선형 모델을 다루는 첫 번째 포괄적 접근으로 평가될 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기