소비자 테스트 시뮬레이션 허용 오차 범위 체계적 평가와 시나리오 생성
초록
본 논문은 EuroNCAP의 AEB/FCW 평가에서 발생하는 허용 오차(차량 횡위치·속도 등)를 그래프 기반 형식 모델로 정형화하고, 이를 바탕으로 다양한 시뮬레이션 시나리오를 자동 생성한다. 생성된 시나리오를 통해 제동점·충돌 회피 성능에 미치는 파라미터별 영향을 정량적으로 분석함으로써, OEM이 시험 설계와 시스템 튜닝에 활용할 수 있는 실증적 근거를 제공한다.
상세 분석
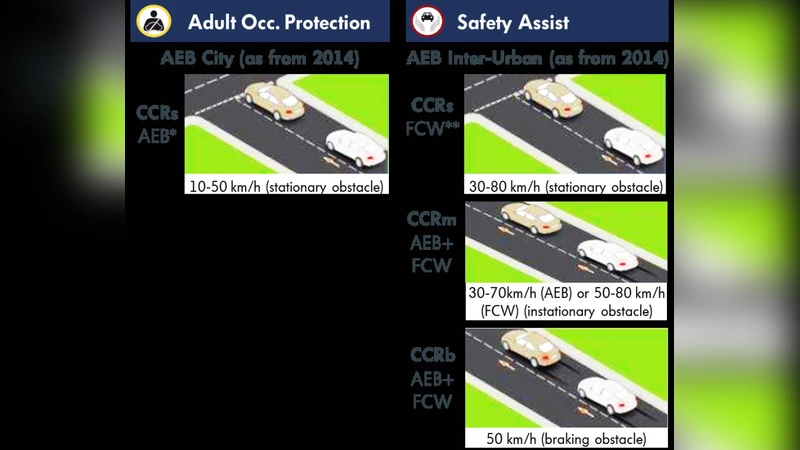
이 연구는 EuroNCAP이 제시한 최신 AEB/FCW 시험 프로토콜이 요구하는 ‘허용 오차 범위’를 정량적 모델링의 과제로 삼는다. 저자는 먼저 시험 진행 중 핵심 시점(예: 충돌 임계 시점, 목표 차량 감지 시점 등)을 노드로 하는 유향 그래프를 설계하고, 각 노드 사이에 허용 가능한 변동값(횡위치, 속도, 가속도 등)을 엣지 가중치로 부여한다. 이 그래프는 시간 축을 따라 연속적인 상태 전이를 나타내며, 허용 오차가 누적되는 효과를 시각화한다는 점에서 기존의 단일 파라미터 변동 분석과 차별화된다.
특히, 저자는 VUT(Vehicle‑Under‑Test)의 접근 속도를 다중 레벨(예: 30 km/h, 40 km/h, 50 km/h)로 확장함으로써, 동일한 횡위치 오차가 속도에 따라 제동점에 미치는 비선형 영향을 탐색한다. 시뮬레이션 환경은 고정밀 차량 동역학 모델과 센서 모델(레이더·카메라)을 통합했으며, 각 그래프 경로에 해당하는 시나리오는 자동으로 시뮬레이션 입력 파일로 변환된다.
실험 결과는 두드러진 인사이트를 제공한다. 첫째, 동일한 횡위치 오차라도 고속 상황에서는 제동 개시 시점이 크게 앞당겨져 충돌 회피 거리가 감소한다. 둘째, 속도 변동이 클수록 시스템의 감지‑반응 지연이 누적되어, 특정 조합(예: 50 km/h + ±0.3 m 횡위치)에서는 EuroNCAP 기준인 0.3 s 내 제동 개시를 초과한다. 셋째, 그래프 기반 모델은 ‘위험 구간’(critical region)과 ‘안전 구간’(safe region)을 명확히 구분해, 시험 설계 단계에서 위험 시나리오를 사전에 식별하고 집중 테스트를 수행하도록 지원한다.
이러한 접근법은 기존에 수작업으로 설계되던 시험 시나리오의 한계를 극복하고, 파라미터 공간을 체계적으로 탐색함으로써 OEM이 설계 단계에서 AEB/FCW 알고리즘을 최적화하고, EuroNCAP 점수 향상을 위한 전략적 의사결정을 내릴 수 있게 한다. 또한, 향후 보행자 검출·양방향 교통 상황 등 확대된 시험 범위에도 동일한 그래프‑시뮬레이션 파이프라인을 적용할 수 있어 확장성이 높다.
댓글 및 학술 토론
Loading comments...
의견 남기기