오션버 3D‑VAR 수평 공분산 계산을 위한 3차 재귀필터 혁신
초록
본 논문은 기존 1차 정확도 재귀필터(1st‑RF)를 대체하여 3차 정확도 재귀필터(3rd‑RF)를 도입함으로써 OceanVar 3D‑VAR 동화 시스템의 수평 가우시안 공분산을 효율적으로 근사한다. 3rd‑RF는 단일 반복만으로도 높은 정확도의 가우시안 커널을 재현하며, CPU 소요 시간을 크게 단축한다. 지중해와 전 세계 해양 모델에 적용한 실험 결과, 동화 정확도와 연산 효율 모두에서 기존 방식보다 우수함을 확인하였다.
상세 분석
OceanVar는 3차원 변분 동화(3D‑VAR) 체계에서 배경오차 공분산 행렬 B를 여러 선형 연산자들의 곱으로 분해하고, 그 중 수평 공분산 연산자 V_H를 가우시안 형태로 근사한다. 기존 구현에서는 1차 정확도 재귀필터(1st‑RF)를 5회 반복 적용해 가우시안 커널을 재현했으며, 이는 연산량이 큰 병목으로 작용했다. 논문은 이 문제를 해결하기 위해 Young·Van Vliet(1995) 방식에 기반한 3차 정확도 재귀필터(3rd‑RF)를 설계한다. 3rd‑RF는 전방·후방 2단계 차분식에 α₁, α₂, α₃, β 네 개의 계수를 사용해 입력 신호 s₀를 한 번의 전방 필터링(p)와 한 번의 후방 필터링(s)으로 처리한다. 계수는 상관반경 R과 격자 간격 Δx에 대한 유리함수 형태로 사전에 계산되며, 논문 부록에 제시된 a₀~a₃ 식을 통해 정확히 정의된다.
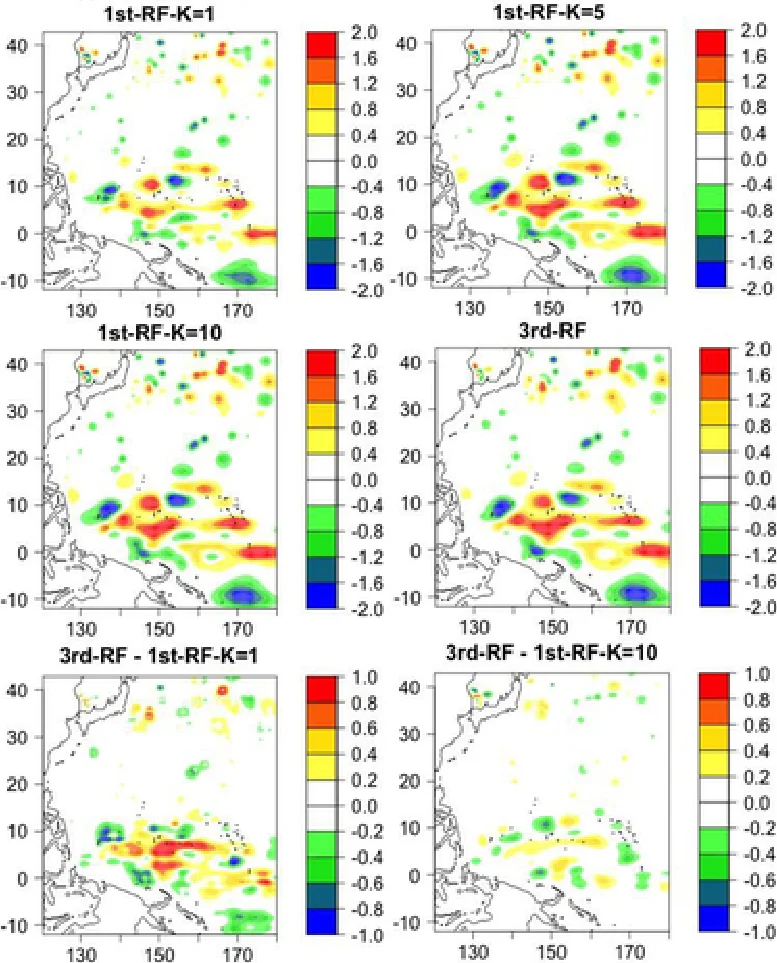
정밀도 분석에서는 임펄스 응답 h_i와 실제 가우시안 g_i 사이의 L₂ 오차 ‖ε_s‖를 도입해, 3rd‑RF가 1st‑RF에 비해 동일한 격자·반경 조건에서 ‖ε_h‖가 크게 감소함을 보였다. 특히, 300점 1‑D 격자와 R=12 000 m, Δx=6 000 m 설정에서 1st‑RF는 10회 이상 반복해야 가우시안 형태에 근접했지만, 3rd‑RF는 단일 반복만으로도 오차가 10⁻⁴ 수준 이하로 수렴했다.
계산 비용 측면에서는 n차 RF의 연산량을 O(n·K·M) (K: 반복 횟수, M: 격자점 수)로 표현하고, 3rd‑RF는 K=1, n=3이므로 1st‑RF(K=5, n=1) 대비 약 5배 빠른 실행 시간을 기록한다. 병렬 환경에서도 3rd‑RF는 인접 프로세서 간 데이터 교환량이 적어 확장성이 높다.
실험은 두 가지 실제 적용 사례에 초점을 맞춘다. 첫 번째는 지중해 해양 모델(Pinardi et al., 2010)이며, 두 번째는 전 세계 해양 모델(Storto et al., 2011)이다. 두 경우 모두 동일한 관측 데이터(온도·염분·위성 표면 높이 등)를 사용해 1st‑RF와 3rd‑RF를 비교하였다. 결과는 분석 장벽 감소, RMSE 개선, 그리고 전체 동화 사이클당 평균 CPU 시간 감소(지중해 약 30 %, 전 세계 약 25 %)를 보여준다. 또한, 3rd‑RF는 다양한 상관반경(Rₓ, R_y) 설정을 자유롭게 지원해 지역별 스케일링 요구를 충족한다.
결론적으로, 3rd‑RF는 가우시안 공분산 근사의 수학적 정확성을 유지하면서 연산 효율성을 크게 향상시킨다. 이는 고해상도 해양 예측 시스템에서 실시간 동화가 요구되는 상황에 특히 유용하며, 향후 비등방성 공분산이나 비선형 필터링으로 확장될 가능성을 시사한다.
댓글 및 학술 토론
Loading comments...
의견 남기기