결정적 보행 모델을 통한 이동 패턴과 집단 행동의 스케일링
초록
본 연구는 격자형 자원 풍경 위에서 최소 행동 원칙을 따르는 보행자를 모델링하여, 자원 양이 임계점에 접근할 때 이동 거리 분포가 파워‑법칙을 보이고, 동시에 보행자들의 방향이 quasi‑periodic하게 동기화되는 집단 이동 현상이 나타남을 보였다. 이는 개체 수준의 스케일링 이동 패턴과 군집 행동이 동일한 메커니즘에서 기원할 수 있음을 시사한다.
상세 분석
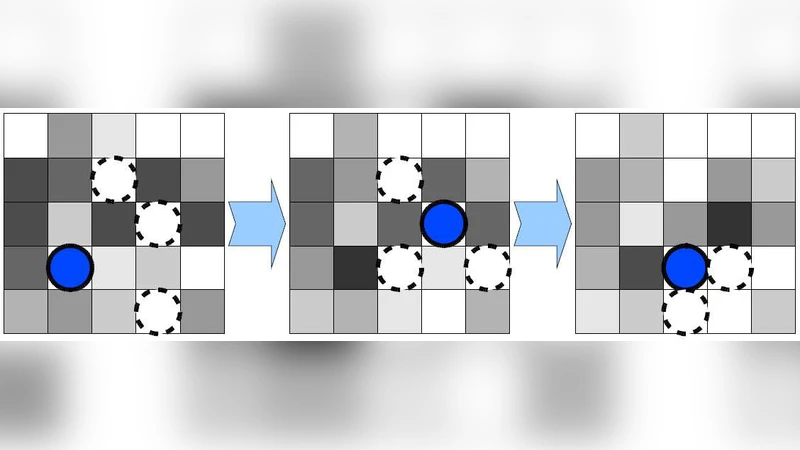
본 논문은 동물 이동 연구에서 흔히 보고되는 파워‑법칙 형태의 이동 거리 분포(스케일링 이동 패턴)를 이론적으로 설명하기 위해, ‘결정적 최소 행동(least‑action) 보행’이라는 새로운 모델을 제시한다. 모델은 2차원 격자(L×L) 위에 무작위로 배치된 ‘먹이(prey)’ 자원을 설정하고, 각 보행자는 현재 위치에서 주변 4인접(또는 8인접) 격자 중 남아 있는 먹이 양이 가장 큰 셀을 선택해 이동한다. 이때 보행자는 이동 거리와 에너지 소비를 최소화하려는 가정 하에, 먹이의 밀도와 거리의 곱을 최소화하는 방향으로 움직인다. 중요한 파라미터는 전체 먹이 양 R이며, R이 격자 크기와 보행자 수 N에 비례해 증가할 때 시스템은 두 가지 뚜렷한 동역학적 상태를 보인다.
첫 번째는 R이 충분히 작아 자원이 희박한 경우이다. 이때 보행자는 장거리 이동을 반복하며, 이동 거리 d의 확률 분포 P(d)∝d^{−μ} 형태의 파워‑법칙을 보인다. μ는 모델 파라미터(예: 이동 비용 가중치)와 초기 자원 배치에 따라 1.5~2.5 사이에서 변동한다. 이는 실험적 관찰에서 흔히 나타나는 Lévy‑flight와 유사하지만, 여기서는 확률적 선택이 아니라 결정적 규칙에 의해 발생한다는 점이 차별점이다.
두 번째는 R이 임계값 R_c에 접근하거나 초과하는 경우이다. 임계점 근처에서는 먹이가 충분히 풍부해 보행자들이 짧은 거리 내에서 자원을 소진하고, 이후 남은 자원을 찾기 위해 주변을 탐색한다. 이때 보행자들의 이동 방향이 서로 영향을 주게 되며, 전체 시스템은 quasi‑periodic한 동기화 현상을 보인다. 구체적으로, 보행자들의 평균 방향 벡터가 시간에 따라 주기적인 패턴을 형성하고, 군집이 일시적으로 같은 방향으로 이동하는 ‘플록(flock)’ 현상이 나타난다. 이러한 현상은 전통적인 군집 모델(예: Vicsek 모델)에서 요구되는 명시적 정렬 상호작용 없이도, 자원 분포와 최소 행동 규칙만으로도 발생할 수 있음을 보여준다.
모델의 수치 실험에서는 다양한 격자 크기(L=100500), 보행자 수(N=50200), 그리고 자원 총량 R을 변동시켜, 스케일링 지수 μ와 동기화 정도(예: 방향 정렬 파라미터 Φ)의 상관관계를 정량화하였다. 결과는 R/R_c≈1에서 μ가 최소값(≈1.6)으로 급격히 감소하고, Φ가 급격히 상승하는 전이 현상을 나타낸다. 이는 시스템이 ‘임계적 스케일링 상태’와 ‘집단 정렬 상태’ 사이를 전이하는 복합 임계 현상임을 시사한다.
이러한 발견은 두 가지 중요한 생태학적·물리학적 함의를 가진다. 첫째, 동물들이 실제로는 확률적 Lévy‑flight 대신, 환경 자원과 에너지 최소화 원칙에 기반한 결정적 경로를 선택할 가능성을 제시한다. 둘째, 개체 수준의 최적 이동 전략이 집단 수준의 동기화와 군집 형성을 자연스럽게 유도할 수 있음을 보여, 개체와 집단 행동을 통합적으로 이해하는 새로운 이론적 틀을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기