저궤도 레이더 데이터의 전리층 보정 필요성
초록
본 논문은 저궤도(LEO) 인공위성 추적에 사용되는 레이더 신호가 전리층·플라스마스피어에 의해 발생하는 그룹 지연과 굴절을 보정해야 함을 강조한다. 고도와 실시간 우주기상에 따라 보정 모델을 맞춤화해야 하며, 재진입 단계에서는 보정 효과가 특히 크게 나타난다. EURIPOS 프로젝트를 기반으로 한 연구 로드맵을 제시한다.
상세 분석
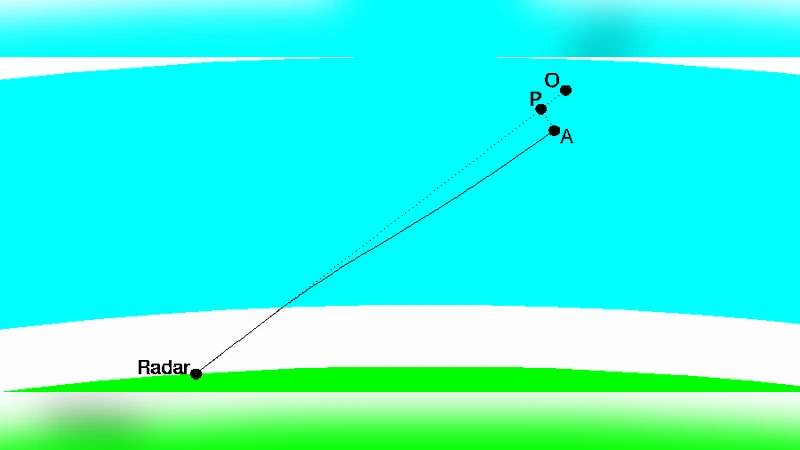
레이다는 전파를 이용해 LEO 물체의 거리·속도를 측정하지만, 지구를 둘러싼 전리층‑플라스마스피어는 전자밀도 분포에 따라 전파의 전파속도를 감소시키고 경로를 굴절시킨다. 이 현상은 ‘그룹 지연’(signal travel time increase)과 ‘위상 굴절’(apparent angle shift)으로 나타나며, 특히 고도 200 km 이하에서 전자밀도가 급격히 변하는 전이층(TI) 구역을 통과할 때 그 영향이 크게 증폭된다. 전리층 보정이 부정확하면 레이다 기반 궤도 결정 오차가 수십 미터에서 수백 미터까지 확대될 수 있어, 충돌 회피·재진입 예측 등 안전성에 직접적인 위험을 초래한다.
보정 모델은 크게 두 축으로 설계되어야 한다. 첫 번째는 ‘고도 의존성’이다. 저궤도 물체는 전리층 상부(≈400 km)와 하부(≈200 km) 사이를 빠르게 통과하므로, 고도별 전자밀도 프로파일을 실시간으로 반영하는 다층 모델이 필요하다. 두 번째는 ‘우주기상 의존성’이다. 태양풍, 플라즈마 폭풍, 일중 변동 등은 전리층 전자밀도를 수시간 내에 10 % 이상 변동시킨다. 따라서 GNSS 기반 TEC(Total Electron Content) 관측, 이온소나데 측정, 그리고 물리 기반 전리층 시뮬레이션(예: SAMI3, TIE‑GCM)을 결합한 데이터 동화 기법이 필수적이다.
재진입 단계에서는 물체가 대기와 강하게 상호작용하면서 전리층 경계가 급격히 변하고, 전자밀도 불균일성으로 인한 비선형 굴절이 심화된다. 이때는 고정된 보정 파라미터가 무용지물이 되며, 실시간 전리층 모니터링과 고해상도 3‑D 전자밀도 모델이 요구된다. 또한, 레이다 파장의 선택도 중요하다. X‑밴드·S‑밴드와 같은 고주파는 전리층 효과가 상대적으로 작지만, 저주파(L‑밴드·U‑밴드)는 지연이 크게 나타나므로 파장별 보정 전략을 병행해야 한다.
EURIPOS(EUropean Research Infrastructure for the Prevention Of Space threats) 이니셔티브는 이러한 문제를 해결하기 위한 공동 연구 플랫폼을 제공한다. 논문은 전리층 보정 기술 개발을 위한 세 가지 연구 접근법을 제시한다. 첫째, 다중 레이다·다중 GNSS 관측을 통합한 ‘관측 융합’ 체계 구축; 둘째, 인공위성·우주선 자체에 탑재 가능한 소형 전리층 센서(플라즈마 프로브·전리층 라디오)를 활용한 ‘현장 측정’ 네트워크 확대; 셋째, 머신러닝 기반 ‘예측 모델’ 개발로 실시간 보정 파라미터를 자동 생성한다. 이러한 접근법은 전리층 보정 정확도를 10 % 이상 향상시키고, 재진입 시뮬레이션의 불확실성을 현저히 감소시킬 것으로 기대된다.
결론적으로, 레이다 기반 LEO 추적 시스템은 전리층·플라스마스피어의 동적 특성을 정량적으로 반영하는 맞춤형 보정이 필수이며, 고도·우주기상·파장·재진입 단계별로 차별화된 모델링이 요구된다. EURIPOS와 같은 국제 협력 체계가 이를 실현하기 위한 핵심 인프라가 될 것이다.
댓글 및 학술 토론
Loading comments...
의견 남기기