MASTER‑VWF 로봇 광시야 관측망의 실시간 초광변광 탐지와 데이터 처리
초록
MASTER‑VWF는 광시야 로봇망으로, 광학적 트랜지언트(GRB, 초신성, 노바 등)를 실시간으로 탐지·분류한다. 7개월간 6건의 감마선 폭발을 동시 관측했으며, 모두 상한 제한을 제시했다. 본 논문은 시스템 구조, 이미지 전처리·천체 검출 알고리즘, 트랜지언트 분류 체계, 관측 결과와 향후 개선점을 상세히 기술한다.
상세 분석
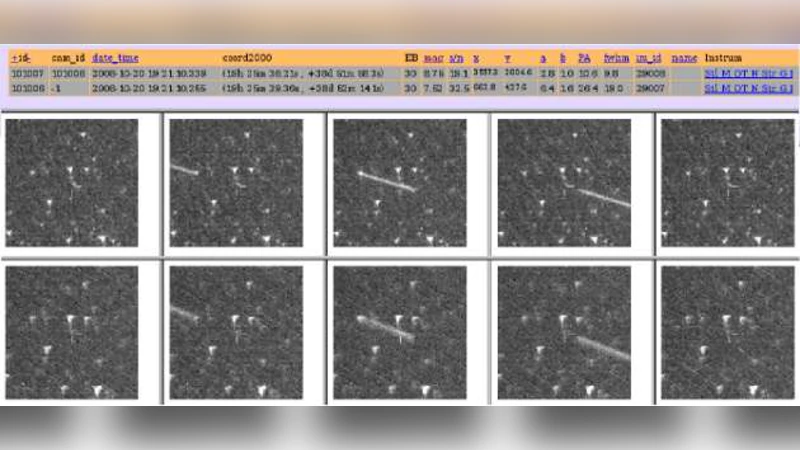
MASTER‑VWF는 러시아 Kislovodsk와 Irkutsk에 설치된 두 개의 광시야(약 800 deg²) 카메라 시스템으로, 전자동 로봇 제어와 실시간 데이터 파이프라인을 갖춘다. 하드웨어는 50 mm f/1.2 렌즈와 4k × 4k CMOS 센서를 결합해 2.5″ pixel‑scale을 구현하고, 10 s 이하의 이미지 적재 시간을 목표로 설계되었다. 소프트웨어는 이미지 캘리브레이션(바이어스, 다크, 플랫), 별 매칭을 통한 천구 좌표 정밀 보정, 그리고 차분 이미지 분석을 기반으로 한다. 차분 단계에서는 기존 별 목록과 현재 프레임을 정밀히 정렬한 뒤, PSF‑matched 서브트랙션을 수행해 변광원을 검출한다. 검출된 후보는 신호‑대‑노이즈(S/N) 임계값, 모양 파라미터(이심률, FWHM), 그리고 주변 배경 변동성을 기준으로 필터링된다. 이후 머신러닝 기반 분류기(랜덤 포레스트)를 이용해 인공위성, 항성 플레어, 대기 현상 등 인위적·자연적 잡음을 구분한다. 실시간 알림은 VOEvent 형식으로 전송되어 전 세계 네트워크와 연동된다. 7개월 운용 동안 6건의 GRB 트리거에 대해 동시 관측을 수행했으며, 모두 광학적 상한(예: R ≈ 13 mag)만을 얻었다. 이는 관측 시점이 GRB 발생 직후 수십 초 이내였음에도 불구하고, 감도 한계와 대기 조건이 주요 제약 요인임을 시사한다. 논문은 또한 데이터 저장·전송 인프라(고속 네트워크, 분산 데이터베이스)와 장기적인 시스템 업그레이드 방안(대형 포맷 센서, 적응형 노출 제어)도 논의한다. 전반적으로 MASTER‑VWF는 광시야 로봇망이 실시간 트랜지언트 탐지에 적합함을 입증했으며, 향후 감도와 자동 분류 정확도를 높이면 초단기 광학 천문학에서 핵심 역할을 할 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기