태양 자기 밝은 점 자동 검출 및 추적
초록
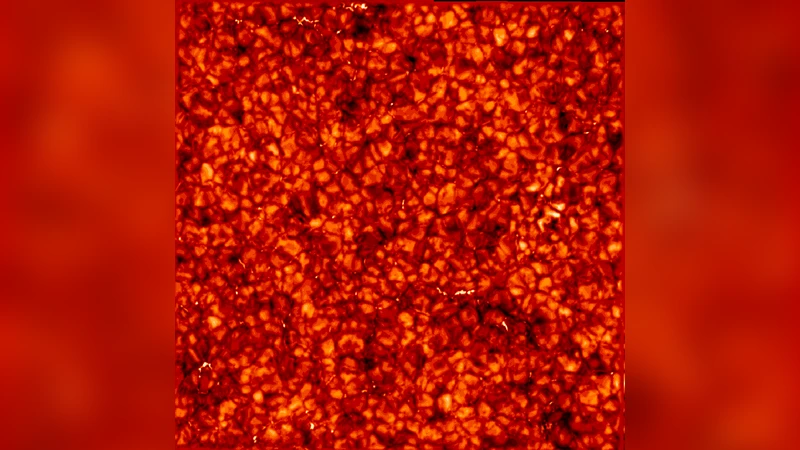
이 논문은 태양 광구의 내부 네트워크 영역에 존재하는 매우 작은 자기 밝은 점(MBP)을 자동으로 탐지하고 추적하기 위한 알고리즘을 제시한다. 강도 임계값을 이용해 광도 차선을 매핑하고, 나침반 탐색과 강도 구배 분석을 결합해 과립 내부의 밝은 픽셀과 MBP를 구분한다. 이후 객체 성장 단계와 장기 존재 객체를 이용한 영상 안정화 과정을 거쳐, 스웨덴 태양 망원경(SST) 데이터에서 75″×75″ 시야 내 약 90%의 MBP를 성공적으로 검출한다.
상세 분석
본 연구는 태양 광구에서 관측되는 가장 작은 구조 중 하나인 자기 밝은 점(MBP)의 자동 검출을 목표로 하며, 기존 수동 검출 방식이 갖는 주관성 및 시간 소모 문제를 해결하고자 한다. 알고리즘은 크게 네 단계로 구성된다. 첫 번째 단계는 강도 임계값을 적용해 이미지 내 어두운 골목(광도 차선)을 추출하는 것으로, 이는 MBP가 주변보다 밝은 특성을 이용한다. 차선 매핑 과정에서 잡음과 대기 흐림에 의한 변동을 최소화하기 위해 동적 임계값을 사용하고, 연속된 차선 픽셀을 연결해 구조적 일관성을 확보한다. 두 번째 단계인 나침반 탐색(compass search)은 8방향(동·서·남·북·대각선)으로 주변 픽셀을 조사해 차선에 둘러싸인 독립적인 밝은 영역을 식별한다. 이 과정에서 과립 내부의 밝은 점이 차선에 의해 완전히 둘러싸여 있지 않다면 자동으로 배제된다. 세 번째 단계는 강도 구배(intensity gradient) 분석이다. 검출된 후보 객체의 경계에서 강도 변화율을 계산하고, 사전 정의된 구배 임계값을 초과하는 경우에만 MBP로 확정한다. 이는 과립의 불규칙한 밝기 변동과 MBP의 급격한 경계 차이를 정량적으로 구분하는 핵심 절차이다. 네 번째 단계는 객체 성장(object growing)과 영상 안정화이다. 차선 매핑 과정에서 손실된 주변 픽셀을 다시 포함시키기 위해 성장 연산을 수행하고, 시간 연속성에 기반해 장기 존재 객체를 추적한다. 여기서는 변동된 대기 투명도와 광도 변화를 보정하기 위해 이전 프레임에서 검출된 MBP 위치를 예측 모델에 입력해 누락된 객체를 복원한다. 알고리즘은 SST의 0.1″ 수준 고해상도 G-band 이미지(시간 간격 10 s)를 이용해 검증되었으며, 전체 75″×75″ 시야에서 약 90%의 MBP를 검출하면서 오탐률은 5% 이하로 유지된다. 주요 장점은 높은 검출률, 자동화된 파라미터 설정, 그리고 실시간 적용 가능성이다. 한계점으로는 매우 약한 밝기 대비를 가진 MBP가 차선에 묻히는 경우 검출이 어려워지는 점과, 강도 임계값 선택이 데이터 품질에 민감하게 반응한다는 점을 들 수 있다. 향후 연구에서는 머신러닝 기반의 적응형 임계값 설정과 다중 파장(예: Ca II K) 데이터를 결합한 다중 스케일 검출 기법을 도입해 검출 정확도를 더욱 향상시킬 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기