외계 위성에 의한 트랜싯 지속시간 변동: 경사 궤도와 새로운 신호
초록
본 논문은 행성-위성 시스템의 궤도 경사(i ≤ 90°)와 위성의 회전각(α, β, γ)을 고려하여 트랜싯 지속시간 변동(TDV)의 두 가지 주요 성분을 도출한다. 기존의 속도 변동 효과에 더해, 위성 궤도 경사에 의해 발생하는 트랜싯 충돌 매개변수 변동을 새롭게 제시한다. 프로그레이드 위성에서는 두 효과가 가법적으로 합쳐지고, 레트로그레이드 위성에서는 상쇄된다. 이러한 비대칭은 위성의 운동 방향을 판별할 수 있는 가능성을 제공한다. 또한, 경사 궤도에서도 TTV와 TDV의 진폭 비율 η를 이용해 위성의 궤도 반경을 직접 추정할 수 있음을 확인한다.
상세 분석
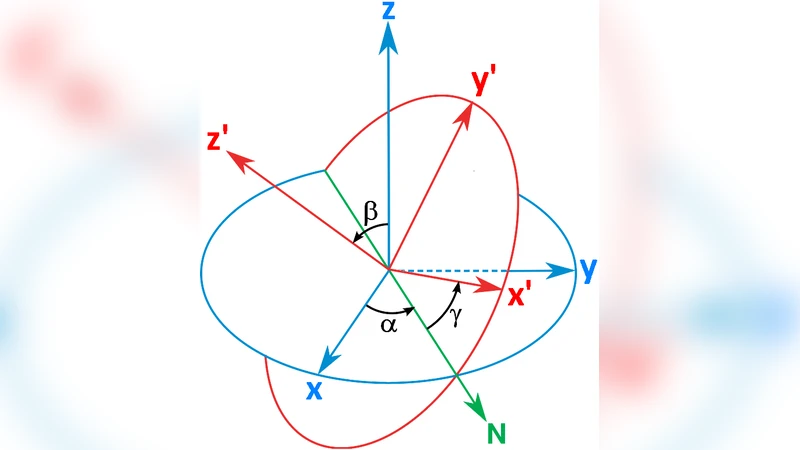
본 연구는 앞선 논문에서 i = 90°인 완전 동축(co‑aligned) 행성‑위성 시스템을 전제로 한 TDV 모델을 일반화한다. 먼저, 행성 궤도 경사 i가 90° 이하인 경우, 관측자 시점에서 행성의 투과 경로가 별의 디스크를 통과하는 충돌 매개변수(b) 가 변동한다는 점을 수학적으로 증명한다. 위성의 궤도는 행성‑별 평면에 대해 Euler 각 α, β, γ 로 회전시켜 정의되며, 이 회전은 위성의 위치 벡터를 행성 중심 좌표계에 투영할 때 추가적인 y‑축(관측선) 변위를 만든다. 결과적으로 위성의 공전으로 인한 행성의 순간 속도 변화(Δv)와, 위성 궤도 경사에 의해 발생하는 충돌 매개변수 변동(Δb)이 각각 TDV에 기여한다.
속도 변동 효과는 기존 논문과 동일하게 ΔTDV_v ≈ (2R★/v_tr)·Δv 로 표현되며, 여기서 R★는 별 반지름, v_tr는 행성의 평균 트랜싯 속도이다. 반면, 충돌 매개변수 변동 효과는 ΔTDV_b ≈ (2R★/v_tr)·(Δb/√(1 − b²)) 로 나타난다. 이 두 항은 위성의 공전 위상에 따라 사인·코사인 형태로 진동하며, 위성의 공전 방향에 따라 부호가 달라진다. 프로그레이드(동일 방향) 위성에서는 ΔTDV_v와 ΔTDV_b가 같은 부호를 가져 전체 TDV 신호가 증폭되고, 레트로그레이드(반대 방향) 위성에서는 부호가 반대가 되어 신호가 부분적으로 상쇄된다.
또한, 논문은 TTV와 TDV의 진폭 비율 η = A_TDV/A_TTV 를 일반화하였다. 경사 궤도와 위성의 회전각을 포함한 복잡한 형태에도 불구하고, 주요 항을 정리하면 η ≈ (2π a_s)/(P_s v_tr)·√(1 − b²) 로, 여기서 a_s는 위성의 궤도 반경, P_s는 위성 공전 주기이다. 따라서 η는 여전히 위성의 궤도 반경을 직접 추정하는 데 유효함을 확인한다.
이러한 결과는 관측 데이터에서 TDV와 TTV를 동시에 측정함으로써 위성의 궤도 기하학, 특히 공전 방향과 경사각을 역추정할 수 있는 새로운 방법론을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기