링 네트워크에서 결정적 대칭 깨기와 위치 발견
초록
이 논문은 원형 토폴로지를 가진 이동 로봇(에이전트) 집합에서, 라운드당 제한된 센서 정보만을 이용해 모든 에이전트가 초기 위치를 서로 알아내는 ‘위치 발견’ 문제를 연구한다. 기본·게으른·지각 모델을 정의하고, 기본·게으른 모델에서는 거리 정보만으로는 초당 선형보다 큰 시간 Ω(n log(N/n)/log n) 이 필요함을 증명한다. 반면 첫 충돌 거리 정보를 제공하는 지각 모델에서는 O(n + o(n))에 가까운 시간으로 문제를 해결한다. 핵심은 ‘구분자(distinguisher)’라는 조합론적 구조를 이용한 대칭 깨기 하한이다.
상세 분석
본 논문은 원주 위에 n개의 동일한 크기의 에이전트가 임의의 서로 다른 위치에 배치된 상황을 가정한다. 각 라운드는 동기화된 1시간 동안 진행되며, 에이전트는 라운드 시작 시 ‘오른쪽(right)’, ‘왼쪽(left)’, 혹은 ‘정지(idle)’ 중 하나를 선택한다. 이동 중 충돌이 발생하면 두 에이전트는 즉시 반대 방향으로 같은 속도로 움직이며, 정지 중인 에이전트와 충돌하면 정지는 해제되고 같은 방향으로 움직이기 시작한다. 중요한 점은 에이전트가 서로 직접 통신하거나 마크를 남기지 못한다는 점이다. 대신 라운드가 끝난 뒤 자신이 이동한 거리(dist)와, 지각 모델에서는 첫 충돌까지의 거리(coll)를 알 수 있다.
모델은 세 가지 변형으로 나뉜다. ‘기본(basic)’ 모델은 idle을 허용하지 않으며, ‘게으른(lazy)’ 모델은 idle을 허용한다. ‘지각(perceptive)’ 모델은 기본 모델에 첫 충돌 거리 정보를 추가한다. 이 차이가 알고리즘 설계와 복잡도에 결정적인 영향을 미친다.
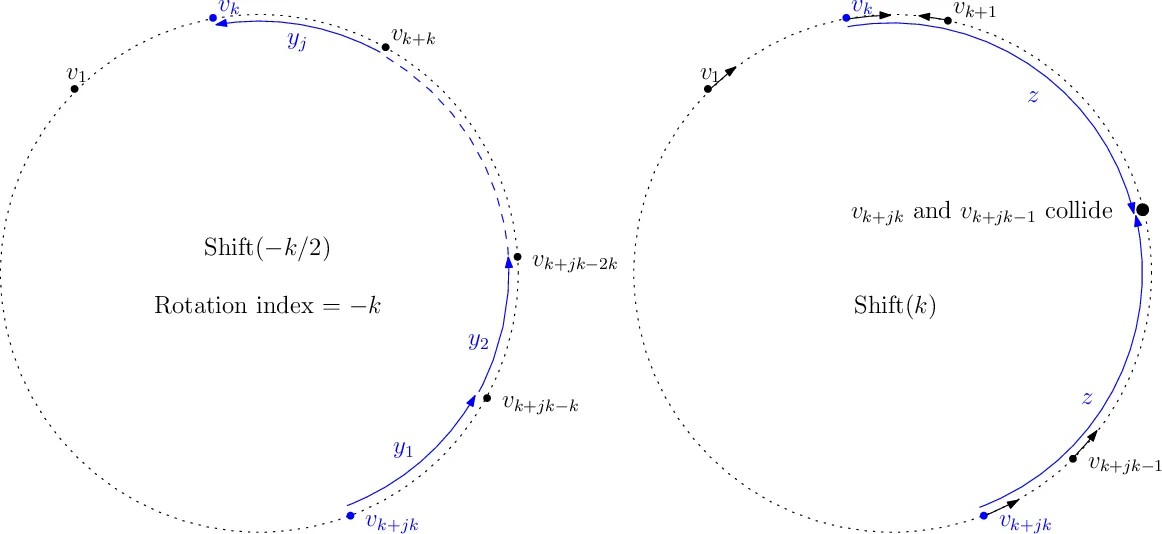
논문은 네 가지 핵심 문제를 정의한다: 방향 합의, 리더 선출, 비자명 이동(non‑trivial move) 문제, 그리고 최종 목표인 위치 발견(LD) 문제. 비자명 이동은 라운드의 회전 인덱스가 0 또는 n/2가 아닌 경우를 의미한다. 회전 인덱스는 (시계 방향 시작 에이전트 수 – 반시계 방향 시작 에이전트 수) mod n 로 정의되며, Lemma 1에 의해 모든 에이전트가 동일한 회전량만큼 순환한다는 사실을 이용한다.
주요 이론적 기여는 ‘구분자(distinguisher)’라는 순수 조합론적 개념을 도입해 대칭 깨기 하한을 증명한 것이다. 구분자는 두 ID 집합이 존재할 때, 어느 라운드에서든 두 집합에 속한 에이전트가 서로 다른 방향을 선택하도록 보장하는 라운드 시퀀스를 의미한다. 확률적 방법을 사용해 구분자의 최소 길이가 Ω(log(N/n)/log n)임을 보였으며, 이를 회전 인덱스와 결합해 전체 라운드 수 하한 Ω(n log(N/n)/log n) 를 도출한다. 이 하한은 n이 짝수이고 에이전트들이 공통된 방향 감각을 공유하지 않을 때 적용된다.
반면, 지각 모델에서는 첫 충돌 거리 정보를 활용해 비자명 이동을 O(√n log N) 라운드 안에 달성한다. 이후 ‘단일 라운드+역 라운드’ 기법을 이용해 에이전트들을 초기 위치로 복귀시키면서, 전체 위치 발견을 n + o(n) (또는 log N = o(√n) 일 때 n/2 + o(n)) 라운드 안에 해결한다. 이는 기존 연구에서 제시된 O(n log² n) 의 무작위 알고리즘보다 훨씬 효율적이며, 결정적 알고리즘으로서 최적에 가깝다.
또한, 논문은 리더 선출, 방향 합의, 비자명 이동 문제 사이의 복잡도 관계를 정리한 정리 7을 제시한다. 이 정리에 따르면, 한 문제를 O(f(n)) 라운드에 해결할 수 있으면 다른 두 문제도 O(f(n) + log N) 라운드에 해결 가능함을 보인다. 따라서 짝수 n 상황에서 기본·게으른 모델의 하한은 모든 조정 문제에 동일하게 적용된다.
마지막으로, 저자들은 표 I·II 를 통해 각 모델·문제 조합에 대한 상한·하한을 정리하고, ‘구분자’ 하한이 실제 알고리즘 설계에 어떻게 영향을 미치는지를 구체적인 예시와 함께 설명한다. 전체적으로 이 논문은 제한된 센서 정보만으로도 원형 네트워크에서 복잡한 전역 정보를 획득할 수 있는 이론적 한계와 효율적인 결정적 알고리즘을 동시에 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기