위협적인 환경에서 확률적 안전 차량 제어
초록
본 논문은 정적 장애물과 이동 적대자를 포함한 동적 도시 환경에서, 지역별 포괄적 확률 모델을 이용해 차량의 이동을 마코프 결정 과정(MDP)으로 추상화하고, 임무를 표현한 PCTL 식을 최대 만족 확률로 해결하는 제어 전략을 제시한다.
상세 분석
이 연구는 기존 로봇 경로 계획이 정적·결정론적 전제에 머물렀던 한계를 극복하기 위해, 두 가지 핵심 확률 모델을 도입한다. 첫째, 적대자(적)의 이동을 포아송 과정으로 모델링하여 각 지역에 존재하는 적의 수가 시간에 따라 지수적으로 변하는 확률적 동역학을 포착한다. 이때 적의 입·출 현황은 각각 λ_e(r), λ_l(r)이라는 레이트 파라미터로 정의되며, 인접 지역 간 독립성을 가정한다. 둘째, 차량이 한 면(facet)에서 인접 면으로 이동하는 데 소요되는 시간을 지수분포로 가정하고, 시뮬레이터를 통해 레이트 λ(δ)를 추정한다. 이러한 가정은 실제 도시 교통 시뮬레이션에서 관측된 이동 시간의 무기억성(memoryless) 특성을 반영한다.
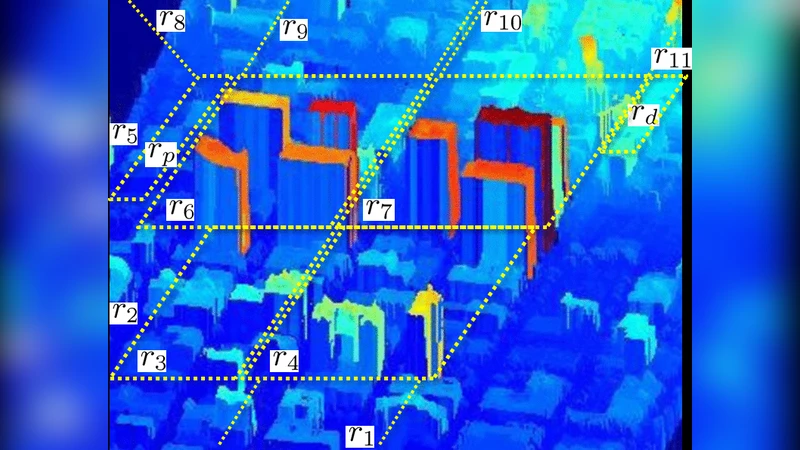
이 두 확률 요소를 결합해 전체 시스템을 유한 상태 공간 S와 행동 집합 Act를 갖는 마코프 결정 과정(MDP)으로 구성한다. 상태는 (현재 지역, 현재 면, 관측된 적 수, 장애물 밀도) 네 튜플로 정의되며, 행동은 가능한 면 전이 δ∈Δ에 대응한다. 전이 확률 P(s,a,s′)는 (i) 차량 이동 시간의 지수분포에 따른 성공/실패 확률 p_lost_δ(n,o)와 (ii) 적의 포아송 도착·퇴거 과정에 의해 업데이트되는 적 분포를 동시에 고려한다. 따라서 MDP는 차량이 새로운 지역에 진입하거나 적의 이동을 감지할 때마다 동적으로 재평가되는 ‘반응형’ 모델이 된다.
임무 목표는 “시작 → 픽업 지역 → 드롭오프 지역” 순서대로 도달하면서 적과 장애물에 의해 차량이 소실되지 않는 것이라 정의된다. 이를 선형시계논리(CTL)의 확장인 확률적 CTL(PCTL) 식으로 변환한다. 예를 들어, φ = P_max=?
댓글 및 학술 토론
Loading comments...
의견 남기기