유한 위상공간의 P‑지속동형학과 P‑가중 그래프의 동치성
초록
이 논문은 유한 부분순서집합 P에 대해 정의된 P‑지속동형학을, 유한 T₀ 위상공간과 P‑가중 그래프 사이의 범주론적 동형을 이용해 전환한다. 특히, 임의의 P‑지속 객체 X에 대해, 그와 동등한 P‑지속 동형학을 갖는 P‑가중 그래프 G를 구성하고, G의 클리크 복합체가 X와 동일한 지속동형학을 제공함을 증명한다.
상세 분석
논문은 먼저 P‑지속성을 함자 ϕ : P → A (여기서 A는 임의의 범주) 로 정의하고, 이를 A^P 범주에서의 객체로 본다. 유한 T₀ 위상공간 Tf₀ 은 알렉산드로프 위상을 통해 부분순서집합 P와 범주 동형 Tf₀ ≅ P 을 이루며, 이는 Kolmogorov 몫을 이용해 일반 유한 위상공간을 T₀ 공간으로 강등시킬 수 있음을 보인다.
다음으로, 부분순서집합 P에 대한 order complex O(P) 와, 임의의 단순복합체 Σ에 대한 barycentric subdivision O(Σ) 을 정의하고, 이들 사이의 동형성을 이용해 S (단순복합체 범주)와 P 사이의 함자 O 및 π 을 구축한다.
그래프 이론에서는 반사적 그래프 G (자기루프 포함)를 1‑차원 단순복합체로 보고, 클리크 함자 Cl : G → F (플래그 복합체)와 1‑스켈레톤 함자 k₁ : S → G 를 도입한다. 이때 Cl ∘ k₁ 은 일반적으로 항등이 아니지만, 플래그 복합체 F 는 Cl(k₁(Σ)) = Σ 인 복합체들의 전형적인 서브카테고리이다.
핵심은 P‑가중 그래프 (G, ω) 을 정의하고, 각 정점·간선에 P 값을 부여하는 연속 사상 ω : G → P (알렉산드로프 위상) 로 본다. 이때 G_v = { x ∈ G | ω(x) ≤ v } 을 통해 P‑지속 객체 ϕ_G (v) = G_v 를 얻는다.
섹션 3에서는 두 함자 Φ_P : GP → GP 와 Ψ_P : GP → GP 을 정의한다. Φ_P는 P‑가중 그래프를 P‑지속 객체로 변환하고, Ψ_P는 P‑지속 객체를 다시 P‑가중 그래프로 복원한다. 특히, one‑critical P‑지속 객체(각 간선이 최초로 등장하는 최소 P 값이 유일한 경우)를 모아 GP₁ 을 정의하고, Φ_P 와 Ψ_P 가 이 서브카테고리와 전체 GP 사이에서 동등함을 보인다(정리 3.6).
동등성 증명은 Φ_P 가 전사·전단사·전사(essentially surjective, full, faithful)임을 확인함으로써 이루어진다. 또한, Φ̄_P (가중을 보존하는 서브카테고리)와 Ψ_P 사이에 좌우 adjunction이 존재함을 정리 3.7, 3.8 에서 제시한다. 이는 범주론적 관점에서 P‑지속 위상공간과 P‑가중 그래프 사이의 구조적 대응을 완전하게 설명한다.
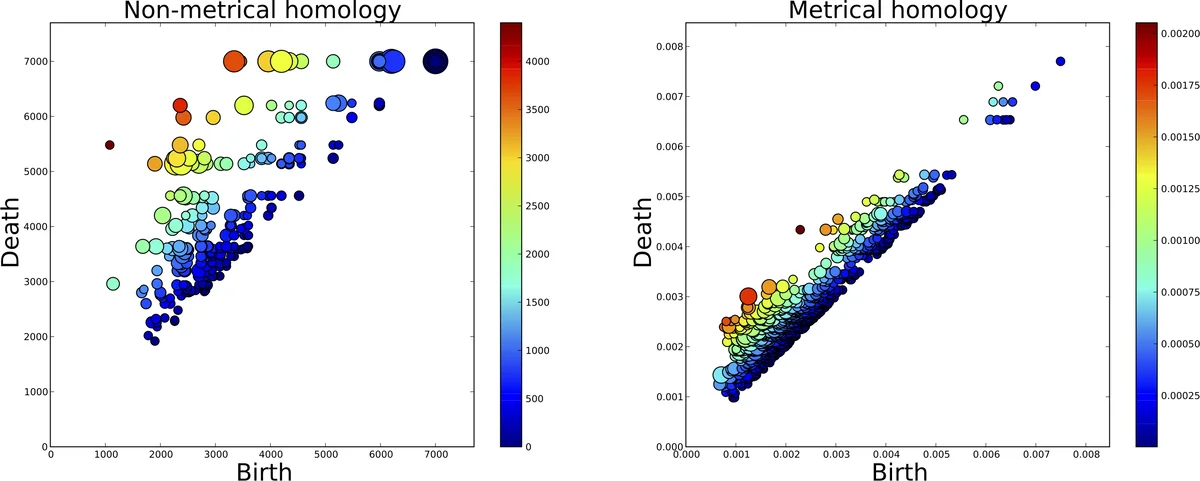
마지막으로, 이러한 이론적 틀을 이용해 실제 데이터(예: 학교 내 접촉 네트워크)에서 메트릭 기반 필터링과 가중 그래프 기반 필터링을 비교한다. 메트릭 필터링은 대각선에 집중된 짧은 지속성을 보이는 반면, 가중 그래프 필터링은 장기간 지속되는 특징을 드러내어 네트워크의 이질성을 포착한다. 논문은 이 차이가 P‑지속 동형학이 메트릭 제한을 넘어서는 일반적인 도구임을 강조한다.
댓글 및 학술 토론
Loading comments...
의견 남기기