고스피너 회전 행렬의 정확한 계산을 위한 푸리에 전개법
초록
본 논문은 고스피너(d) 함수의 전통적 다항식 표현이 큰 각운동량 j (≈ 50 이상)에서 부동소수점 연산의 소실을 일으키는 문제를 지적하고, 반각 θ 에 대한 푸리에 급수 전개를 통해 이를 완전히 해결한다. 계수 tₖ^{jmν} 의 정확한 식을 유도하고, 고정밀 연산을 통해 64‑bit 부동소수점까지 오차 ≤10⁻¹⁴를 달성한다. 구현 코드와 계수 테이블을 보조자료로 제공한다.
상세 분석
논문은 먼저 전통적인 Wigner d 함수의 정의와 Wigner 식(3‑7)을 재검토한다. 이 식은 cos θ/2와 sin θ/2의 거듭제곱을 조합한 다항식 형태이며, j가 커질수록 개별 항의 크기가 2ʲ 에 달해 상쇄되는 과정에서 유효숫자 손실이 급격히 발생한다. 특히 j≈54 에서 double‑precision(53 비트)조차 의미를 상실하고, j≈114 에서는 quadruple‑precision(113 비트)조차 충분치 않다.
이를 극복하기 위해 저자는 cos νθ와 sin νθ(ν는 정수·반정수)로 구성된 푸리에 급수를 도입한다. 식(10)‑(12)에서 d 함수를
d_{jm k}(θ)=∑{ν=ν_min}^{j} t{jm k}^{ν} f(νθ)
형태로 전개하고, f는 ν와 m−k의 짝·홀에 따라 cos 또는 sin을 선택한다. ν_min은 표 I에 명시된 대로 m−k의 패리티와 j에 따라 결정된다.
계수 t_{jm k}^{ν}는 직교성에 기반한 적분식(15)으로 정의되며, 이를 Wigner 식에 대입해 식(16) 형태의 폐쇄식으로 변형한다. 여기서 핵심은 factorial과 이항계수를 포함한 w_{jm k}^{n}과, 짝·홀에 따라 0이 되는 I_{λμ} 적분을 이용해 항의 크기를 O(1) 이하로 억제한다는 점이다. 결과적으로 각 항은 2ʲ 스케일을 갖지 않으며, 전체 급수는 수렴성이 보장된다.
수치적으로는 MAXIMA를 이용해 고정밀(≥74 자리)으로 t 계수를 사전 계산하고, 64‑bit 부동소수점으로 절단한다. j가 100까지 확장했을 때 전체 계수는 약 27 MiB( j_max=50)~40 MiB( j_max=100) 정도의 메모리만 차지한다. 계수의 절대값은 j가 커질수록 감소하지만, 80 %가 10⁻⁵ 이상, 90 %가 10⁻¹⁰ 이상이다.
각 ν에 대한 cos νθ, sin νθ는 재귀식(27)을 이용해 계산한다. 직접 호출보다 재귀를 사용하면 νθ가 큰 경우에도 오차가 10⁻¹⁴ 수준으로 억제된다(그림 1).
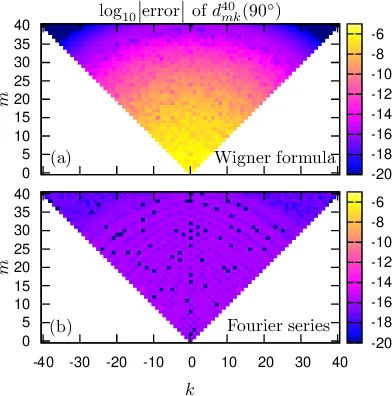
오차 분석에서는 j=40, θ=30°, 60°, 90°에 대해 Wigner 식과 푸리에 급수를 비교한다. Wigner 식은 중앙(m≈k≈0)에서 최대 10⁻⁵ 오차를 보이며, 푸리에 급수는 전 범위에서 10⁻¹⁴ 수준의 일정한 정확도를 유지한다(그림 2‑4). 최대 오차를 j에 대해 로그 스케일로 나타낸 그림 5에서, Wigner 식은 j당 오차가 약 2배씩 증가하는 반면, 푸리에 급수는 1.4 % 정도만 증가한다.
결론적으로, 푸리에 전개는 고스피너 d 함수의 고정밀 계산에 있어 근본적인 해결책을 제공한다. 다만 θ≈0°·180°와 |m+k|≈0·2j 구간에서는 Wigner 식이 오히려 작은 절대값을 정확히 재현하므로, 두 식을 상황에 따라 전환하는 하이브리드 알고리즘이 최적일 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기