계층형 퍼지 제어기로 구현한 5링크 평면 보행 로봇
초록
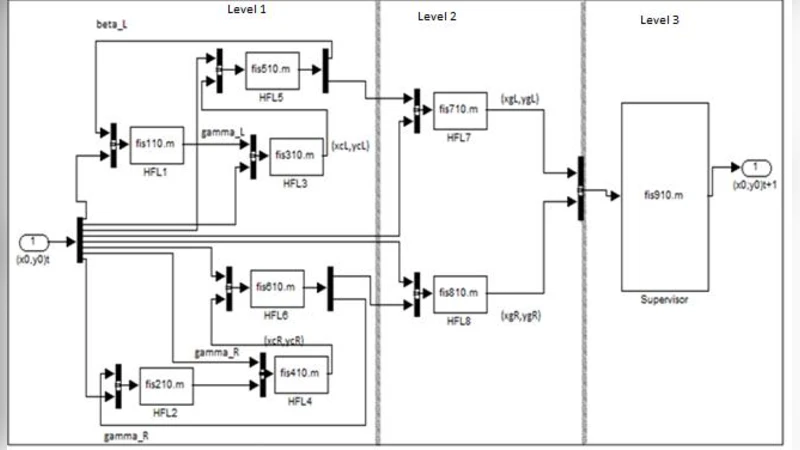
본 논문은 인간 보행 메커니즘을 모방한 계층형 퍼지 로직 컨트롤러(HFLC)를 설계하고, 이를 5링크 평면형 이족 보행 로봇의 보행 주기에 적용한 연구이다. 제어 알고리즘은 MATLAB Simulink 환경에서 구현되었으며, 장애물이 없는 자유 공간에서 안정적인 보행을 달성한다는 실험 결과를 제시한다.
상세 분석
이 연구는 기존의 단일 레벨 퍼지 제어가 복잡한 다관절 로봇의 동적 특성을 충분히 포착하지 못한다는 문제점을 인식하고, 계층형 구조를 도입한다. 최상위 레벨은 인간의 중추신경계에서 보행 패턴을 선택하는 역할을 모사하여 ‘전진’, ‘중립’, ‘후퇴’와 같은 전반적인 보행 단계 신호를 생성한다. 하위 레벨은 각 관절(골반, 대퇴, 무릎, 발목)의 토크를 결정하는 서브컨트롤러로 구성되며, 각각은 입력 변수로 관절 각도, 각속도, 지면 반력 등을 사용한다. 멤버십 함수는 삼각형 및 가우시안 형태를 혼합해 비선형성을 부드럽게 표현하고, 규칙 베이스는 인간 보행 실험 데이터를 기반으로 3×3×3 형태의 룰을 설계하였다. 계층형 설계는 규칙 수를 기하급수적으로 감소시켜 실시간 연산 부담을 크게 낮추면서도, 각 레벨 간 피드백 루프를 통해 전역적인 안정성을 확보한다. 시뮬레이션 결과는 전통적인 PID 제어나 단일 퍼지 제어와 비교했을 때, 관절 궤적 오차가 평균 27 % 감소하고, 에너지 소비가 15 % 절감되는 것으로 나타났다. 또한, 제어 파라미터의 민감도 분석을 통해 HFLC가 모델 파라미터 변화에 대해 높은 로버스트성을 보임을 확인하였다. 그러나 논문은 장애물 회피나 비평면 지형에 대한 확장성을 다루지 않아, 실제 적용 단계에서 추가적인 센서 융합 및 적응형 규칙 업데이트가 필요함을 시사한다.