노이즈에 강한 위상 추정 거리측정과 커널거리
** 본 논문은 데이터에 포함된 잡음과 이상치에 강인한 두 가지 위상적 거리 함수, 즉 거리‑투‑어‑메져(DTM)와 커널 거리의 통계적 특성을 연구한다. 저자들은 DTM과 커널 거리의 수렴 속도, 제한 분포, 부트스트랩 기반 신뢰구간, 그리고 병목 거리(bottleneck distance)의 asymptotic behavior를 제시하고, 실용적인 파라미터 선택 방법과 경계 편향 보정 기법을 제안한다. **
저자: Frederic Chazal, Brittany T. Fasy, Fabrizio Lecci
**
본 논문은 확률분포 \(P\)의 지지 집합 \(S\subset\mathbb{R}^d\)에 대한 위상적 특성을 영속 동형학(persistent homology)으로 요약하는 방법을 다룬다. 전통적인 접근법은 거리 함수 \(\Delta_S(x)=\inf_{y\in S}\|x-y\|\)의 서브레벨 집합 \(L_t=\{x:\Delta_S(x)\le t\}\)를 이용해 연결성, 고리, 구멍 등을 다중 스케일에서 관찰한다. 그러나 실제 데이터는 잡음과 이상치가 섞여 있어, 경험적 거리 \(\hat\Delta(x)=\min_i\|x-X_i\|\)는 이상치 하나만으로도 전체 구조를 왜곡한다. 이는 통계적 견고성 측면에서 breakdown point가 0이라는 심각한 결함을 의미한다.
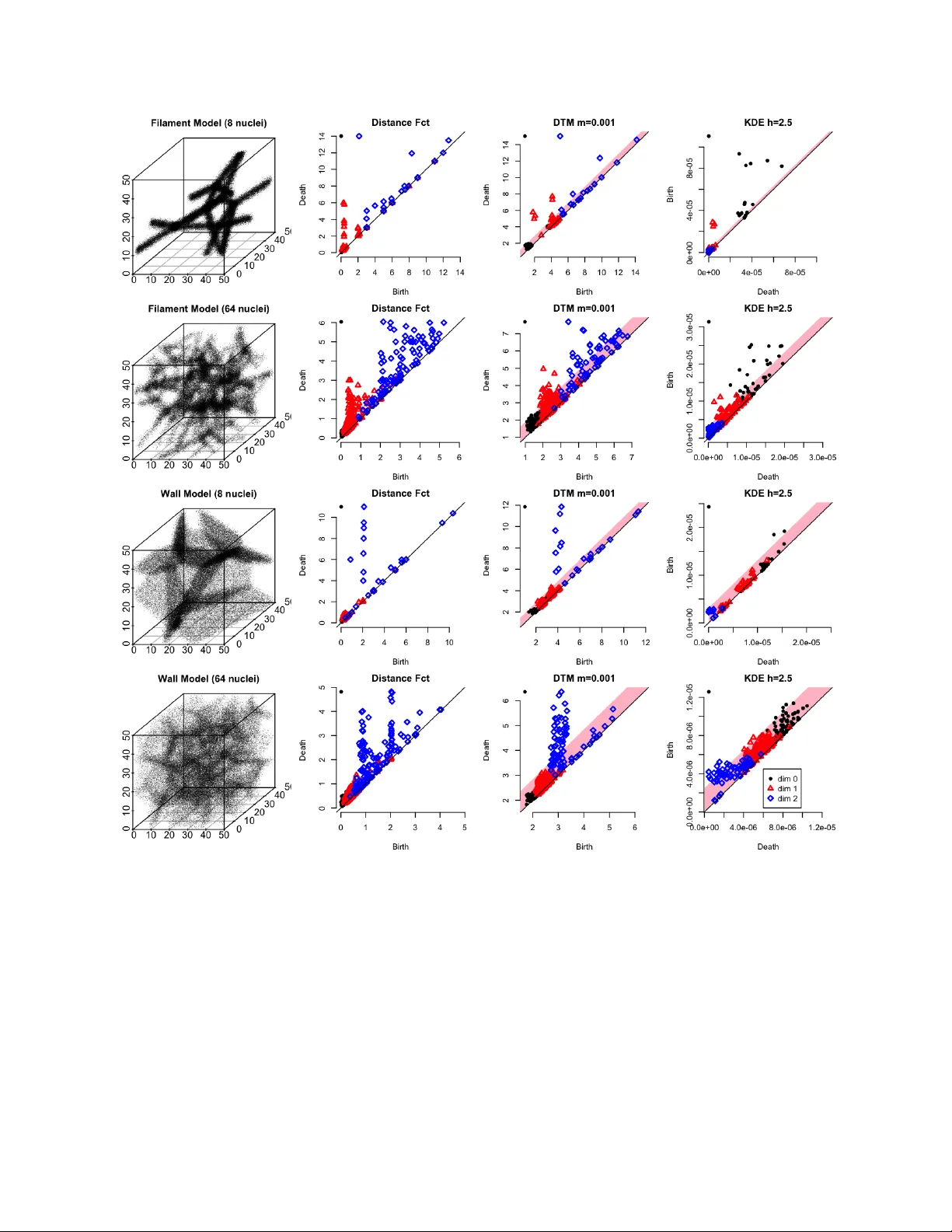
이를 극복하기 위해 두 가지 대안이 제시된다. 첫 번째는 거리‑투‑어‑메져(DTM) \(\delta_{P,m}(x)\)이다. DTM은 \(m\in(0,1]\)를 스무딩 파라미터로 삼아, \(P\)의 \(m\)-분위수에 해당하는 거리 평균을 계산한다. 구체적으로, \(\delta_{P,m}(x)=\big(\frac{1}{m}\int_0^m r_{P,x}^2(u)du\big)^{1/2}\) where \(r_{P,x}(u)\)는 \(P\)가 \(x\)로부터 거리 \(r\) 이하에 포함되는 최소 확률 질량 \(u\)를 만족하는 반경이다. 이 정의는 이상치가 전체 질량에 미치는 영향을 제한한다.
두 번째는 커널 거리이다. 커널 함수 \(K_h\) (예: 가우시안 커널)와 대역폭 \(h\)를 사용해, \(\rho_h(x)=\int K_h(x-y)dP(y)\)를 정의하고, 커널 거리는 \(\sqrt{\rho_h(x,x)-2\rho_h(x)+\rho_h(0)}\) 형태로 표현된다. 이는 커널 밀도 추정기의 레벨셋과 동일한 위상 정보를 제공한다.
논문은 이 두 함수에 대해 다음과 같은 통계적 성질을 체계적으로 증명한다.
1. **점별 및 균등 수렴**: DTM 제곱 \(\delta^2(x)\)와 그 경험적 추정치 \(\hat\delta^2(x)\) 사이의 차이가 \(\sqrt{n}\) 스케일에서 가우시안 프로세스로 수렴한다(정리 5). 이는 \(x\) 전역에 걸친 균등 수렴을 의미한다.
2. **부트스트랩 신뢰구간**: 일반 부트스트랩(재표본) 방법을 적용하면, \(\hat\delta^2\)의 신뢰구간이 asymptotically 정확함을 보인다(정리 18). 이를 통해 영속 다이어그램의 “유의미한” 점(긴 생존시간을 가진 특징)을 통계적으로 구분할 수 있다.
3. **병목 거리의 제한 분포**: 두 영속 다이어그램 사이의 병목 거리 \(\mathbf{d}_\mathrm{B}\)는 \(\sqrt{n}\) 스케일에서 정규분포에 근사한다. 이는 두 데이터 집합이 동일한 위상 구조를 갖는지 검정하는 이론적 근거가 된다.
4. **병목 부트스트랩**: 일반 부트스트랩보다 더 정밀한 추정을 위해, 병목 거리 자체를 부트스트랩하는 방법을 제안한다. 이 방법은 특히 작은 샘플에서 신뢰구간 폭을 크게 줄인다(섹션 6).
5. **커널 거리에 대한 동일한 결과**: 커널 거리 역시 DTM과 동일한 가우시안 수렴, 부트스트랩 유효성, 병목 거리 분포를 만족한다. 따라서 두 방법은 이론적으로 동등하지만, 실제 구현에서는 계산 복잡도와 파라미터 선택이 차이를 만든다.
6. **파라미터 선택**: DTM의 \(m\)과 커널 거리의 \(h\)는 고정값이 아니라 데이터에 맞게 조정해야 한다. 저자들은 영속 다이어그램의 “신호‑대‑잡음 비율”(persistence diagram’s signal-to-noise ratio)을 최적화하는 목적 함수를 정의하고, 교차 검증을 통해 최적 파라미터를 탐색한다(섹션 7.1).
7. **경계 편향 보정**: DTM과 커널 밀도 추정은 경계 근처에서 편향이 발생한다. 이를 해결하기 위해 반사(반전) 기법과 가중치 보정 방식을 도입한다(섹션 7.2).
8. **실험 및 사례 연구**: 천문학 시뮬레이션 데이터(복잡한 V-오노리 점 구름)와 인공 잡음·이상치를 포함한 세 가지 데이터셋을 사용해 실험을 수행한다. 영속 다이어그램을 시각화한 결과, DTM과 커널 거리는 세 번째 데이터셋이 다른 생성 과정을 가졌음에도 불구하고 명확히 구분되는 고유한 고리와 구멍을 포착한다. 반면 경험적 거리 기반 방법은 이상치에 의해 전체 구조가 파괴된다(예 22).
9. **소프트웨어 구현**: R 패키지 **TDA**를 이용해 모든 실험을 수행했으며, 코드와 데이터는 공개되어 재현성을 보장한다.
결론적으로, 이 논문은 위상 데이터 분석에서 핵심적인 거리 기반 방법을 통계적 견고성 프레임워크 안에 정립한다. DTM과 커널 거리는 잡음·이상치가 섞인 현실 데이터에서도 안정적인 영속 정보를 제공하며, 부트스트랩을 통한 불확실성 정량화와 데이터‑드리븐 파라미터 선택 절차를 통해 실용성을 크게 향상시킨다. 이러한 결과는 TDA를 다양한 과학·공학 분야에 적용하려는 연구자들에게 강력한 이론적·실무적 도구를 제공한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기